Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTeleoperated Robot Grasping in Virtual Reality Spaces
Paper and Code
Jan 30, 2023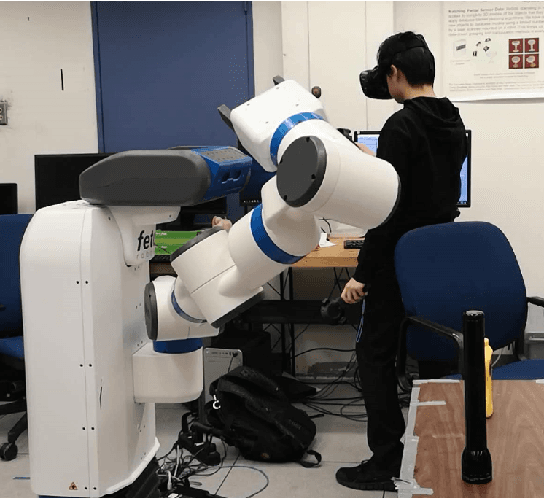
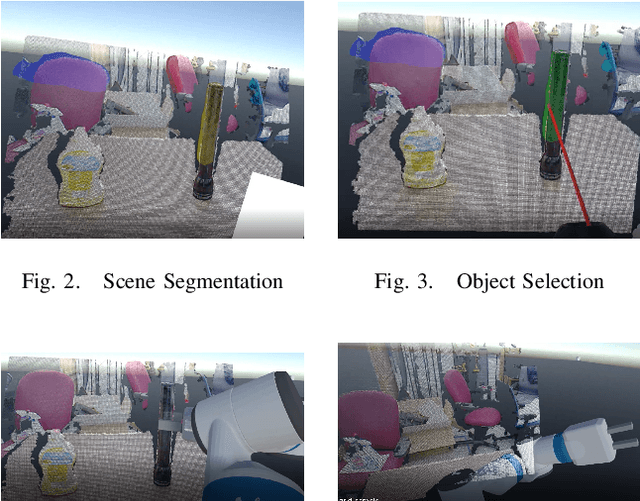
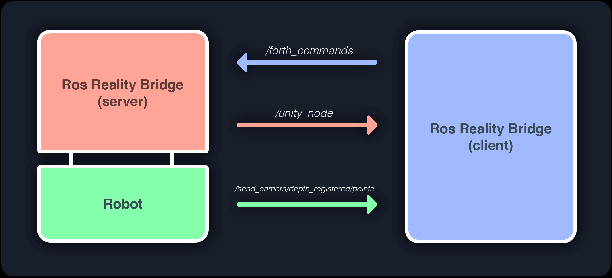
Despite recent advancement in virtual reality technology, teleoperating a high DoF robot to complete dexterous tasks in cluttered scenes remains difficult. In this work, we propose a system that allows the user to teleoperate a Fetch robot to perform grasping in an easy and intuitive way, through exploiting the rich environment information provided by the virtual reality space. Our system has the benefit of easy transferability to different robots and different tasks, and can be used without any expert knowledge. We tested the system on a real fetch robot, and a video demonstrating the effectiveness of our system can be seen at https://youtu.be/1-xW2Bx_Cms.
View paper on