 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTeaching robots to perceive time -- A reinforcement learning approach (Extended version)
Paper and Code
Dec 20, 2019

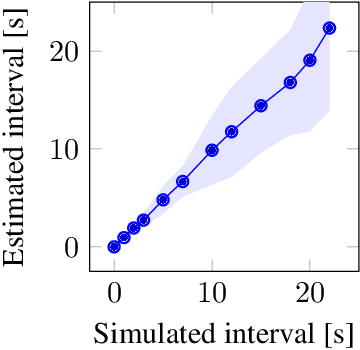
Time perception is the phenomenological experience of time by an individual. In this paper, we study how to replicate neural mechanisms involved in time perception, allowing robots to take a step towards temporal cognition. Our framework follows a twofold biologically inspired approach. The first step consists of estimating the passage of time from sensor measurements, since environmental stimuli influence the perception of time. Sensor data is modeled as Gaussian processes that represent the second-order statistics of the natural environment. The estimated elapsed time between two events is computed from the maximum likelihood estimate of the joint distribution of the data collected between them. Moreover, exactly how time is encoded in the brain remains unknown, but there is strong evidence of the involvement of dopaminergic neurons in timing mechanisms. Since their phasic activity has a similar behavior to the reward prediction error of temporal-difference learning models, the latter are used to replicate this behavior. The second step of this approach consists therefore of applying the agent's estimate of the elapsed time in a reinforcement learning problem, where a feature representation called Microstimuli is used. We validate our framework by applying it to an experiment that was originally conducted with mice, and conclude that a robot using this framework is able to reproduce the timing mechanisms of the animal's brain.