 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask Scoping: Building Goal-Specific Abstractions for Planning in Complex Domains
Paper and Code
Oct 17, 2020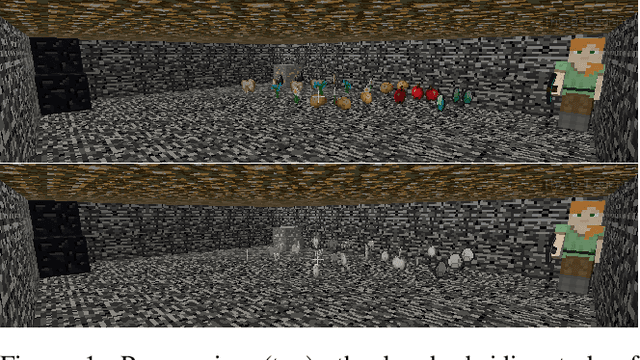


A generally intelligent agent requires an open-scope world model: one rich enough to tackle any of the wide range of tasks it may be asked to solve over its operational lifetime. Unfortunately, planning to solve any specific task using such a rich model is computationally intractable - even for state-of-the-art methods - due to the many states and actions that are necessarily present in the model but irrelevant to that problem. We propose task scoping: a method that exploits knowledge of the initial condition, goal condition, and transition-dynamics structure of a task to automatically and efficiently prune provably irrelevant factors and actions from a planning problem, which can dramatically decrease planning time. We prove that task scoping never deletes relevant factors or actions, characterize its computational complexity, and characterize the planning problems for which it is especially useful. Finally, we empirically evaluate task scoping on a variety of domains and demonstrate that using it as a pre-planning step can reduce the state-action space of various planning problems by orders of magnitude and speed up planning. When applied to a complex Minecraft domain, our approach speeds up a state-of-the-art planner by 30 times, including the time required for task scoping itself.