 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-Informed Fidelity Management for Speeding Up Robotics Simulation
Paper and Code
Oct 27, 2019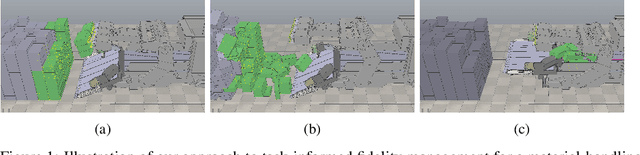


Simulators are an important tool in robotics that is used to develop robot software and generate synthetic data for machine learning algorithms. Faster simulation can result in better software validation and larger amounts of data. Previous efforts for speeding up simulators have been performed at the level of simulator building blocks, and robot systems. Our key insight, motivating this work, is that further speedups can be obtained at the level of the robot task. Building on the observation that not all parts of a scene need to be simulated in high fidelity at all times, our approach is to toggle between high- and low-fidelity states for scene objects in a task-informed manner. Our contribution is a framework for speeding up robot simulation by exploiting task knowledge. The framework is agnostic to the underlying simulator, and preserves simulation fidelity. As a case study, we consider a complex material-handling task. For the associated simulation, which contains many of the characteristics that make robot simulation slow, we achieve a speedup that can be up to three times faster than high fidelity without compromising on the quality of the results. We also demonstrate that faster simulation allows us to train better policies for performing the task at hand in a short period of time. A video summarizing our contributions can be found at https://youtu.be/PEzypDyqc3o .