 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-driven Perception and Manipulation for Constrained Placement of Unknown Objects
Paper and Code
Jun 28, 2020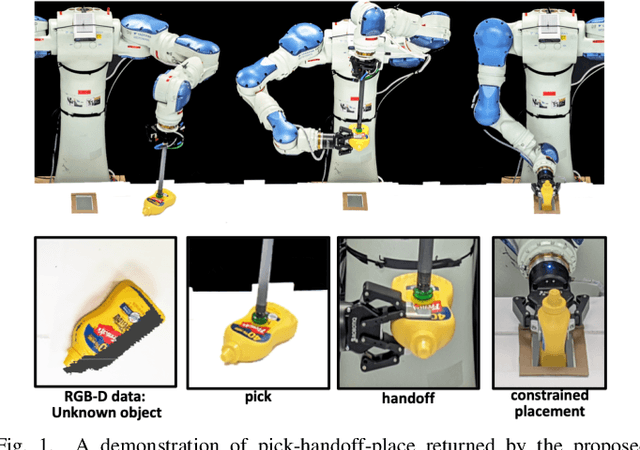
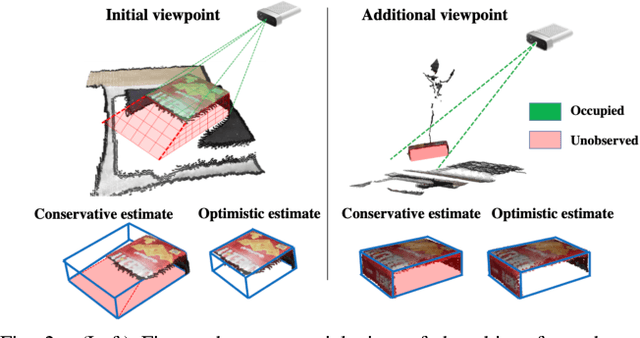
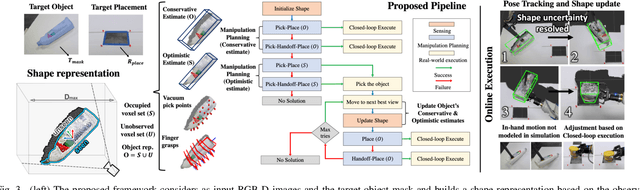
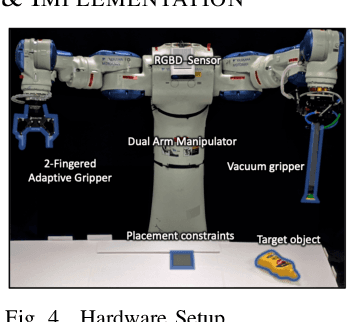
Recent progress in robotic manipulation has dealt with the case of previously unknown objects in the context of relatively simple tasks, such as bin-picking. Existing methods for more constrained problems, however, such as deliberate placement in a tight region, depend more critically on shape information to achieve safe execution. This work deals with pick-and-constrained placement of objects without access to geometric models. The objective is to pick an object and place it safely inside a desired goal region without any collisions, while minimizing the time and the sensing operations required to complete the task. An algorithmic framework is proposed for this purpose, which performs manipulation planning simultaneously over a conservative and an optimistic estimate of the object's volume. The conservative estimate ensures that the manipulation is safe while the optimistic estimate guides the sensor-based manipulation process when no solution can be found for the conservative estimate. To maintain these estimates and dynamically update them during manipulation, objects are represented by a simple volumetric representation, which stores sets of occupied and unseen voxels. The effectiveness of the proposed approach is demonstrated by developing a robotic system that picks a previously unseen object from a table-top and places it in a constrained space. The system comprises of a dual-arm manipulator with heterogeneous end-effectors and leverages hand-offs as a re-grasping strategy. Real-world experiments show that straightforward pick-sense-and-place alternatives frequently fail to solve pick-and-constrained placement problems. The proposed pipeline, however, achieves more than 95% success rate and faster execution times as evaluated over multiple physical experiments.