 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-Directed Exploration in Continuous POMDPs for Robotic Manipulation of Articulated Objects
Paper and Code
Dec 08, 2022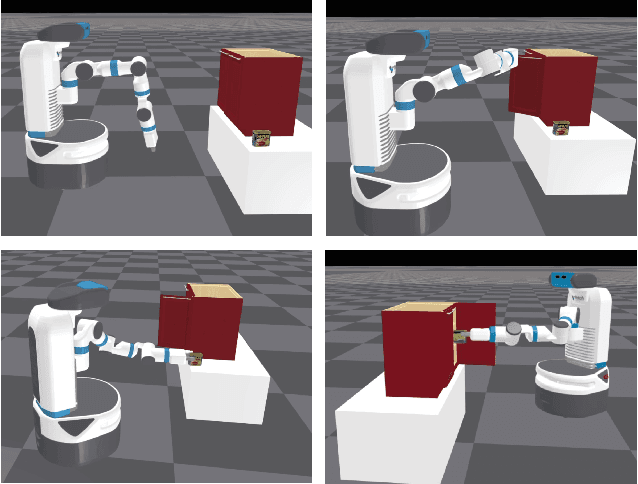
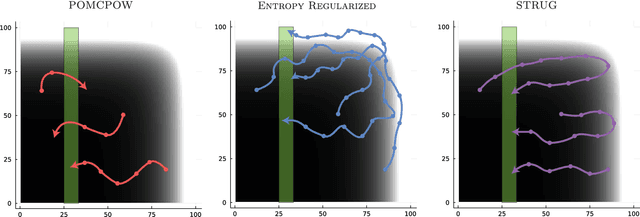
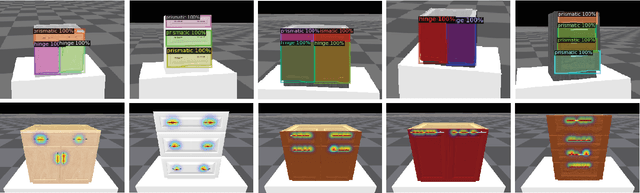

Representing and reasoning about uncertainty is crucial for autonomous agents acting in partially observable environments with noisy sensors. Partially observable Markov decision processes (POMDPs) serve as a general framework for representing problems in which uncertainty is an important factor. Online sample-based POMDP methods have emerged as efficient approaches to solving large POMDPs and have been shown to extend to continuous domains. However, these solutions struggle to find long-horizon plans in problems with significant uncertainty. Exploration heuristics can help guide planning, but many real-world settings contain significant task-irrelevant uncertainty that might distract from the task objective. In this paper, we propose STRUG, an online POMDP solver capable of handling domains that require long-horizon planning with significant task-relevant and task-irrelevant uncertainty. We demonstrate our solution on several temporally extended versions of toy POMDP problems as well as robotic manipulation of articulated objects using a neural perception frontend to construct a distribution of possible models. Our results show that STRUG outperforms the current sample-based online POMDP solvers on several tasks.