 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTarget driven visual navigation exploiting object relationships
Paper and Code
Mar 15, 2020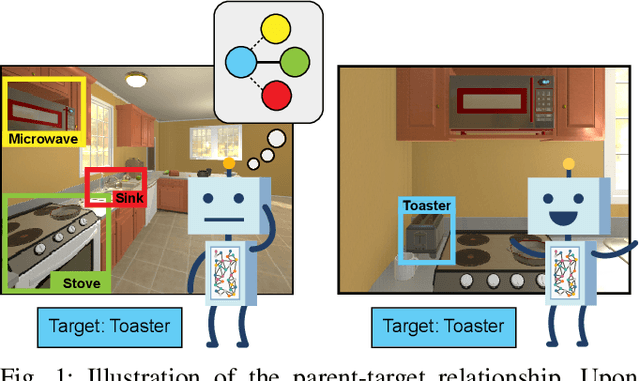
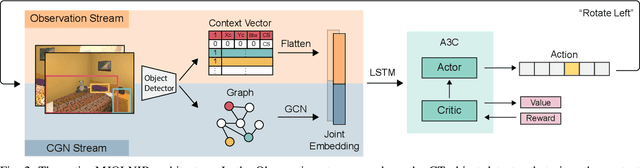
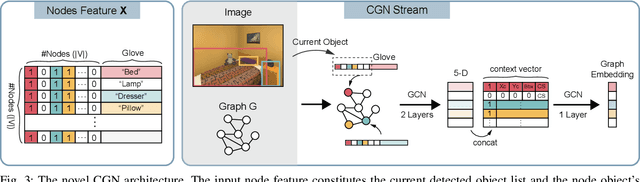
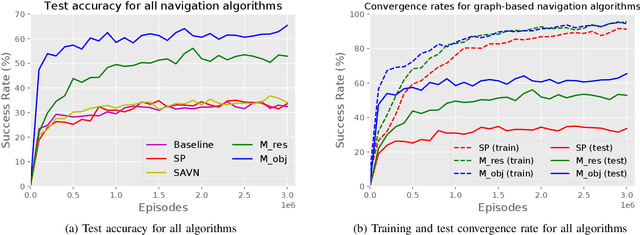
Recently target driven visual navigation strategies have gained a lot of popularity in the computer vision and reinforcement learning community. Unfortunately, most of the current research tends to incorporate sensory input into a reward-based learning approach, with the hope that a robot can implicitly learn its optimal actions through recursive trials. These methods seldom generalize across domains as they fail to exploit natural environment object relationships. We present Memory-utilized Joint hierarchical Object Learning for Navigation in Indoor Rooms (MJOLNIR), a target-driven visual navigation algorithm, which considers the inherent relationship between "target" objects, along with the more salient "parent" objects occurring in its surrounding. Extensive experiments conducted across multiple environment settings show $\approx \textbf{30 %}$ improvement over the existing state-of-the-art navigation methods in terms of the success rate. We also show that our model learns to converge much faster than other algorithms. We will make our code publicly available for use in the scientific community.