 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTarget Assignment in Robotic Networks: Distance Optimality Guarantees and Hierarchical Strategies
Paper and Code
Jul 31, 2014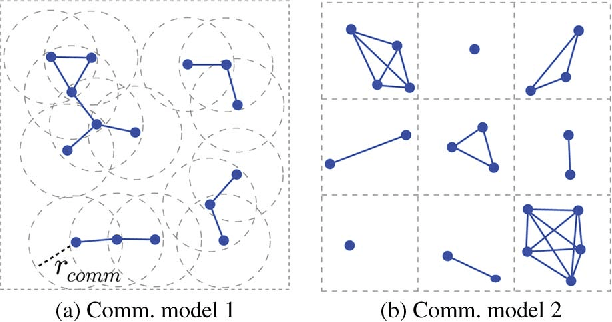

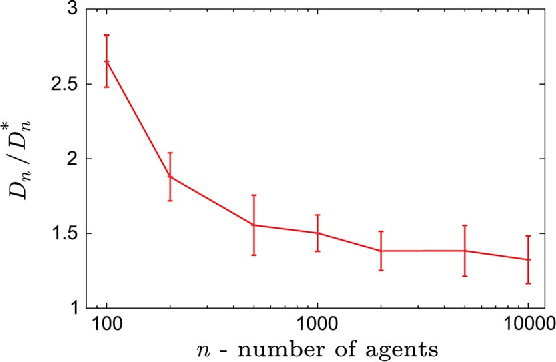
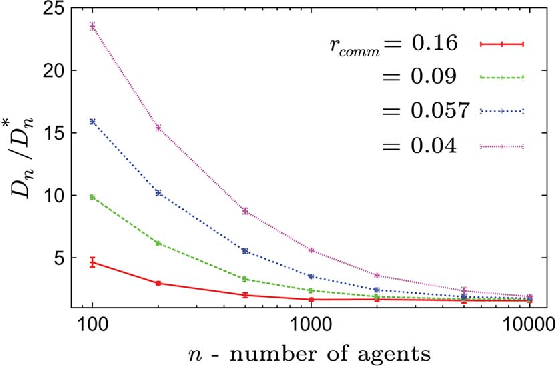
We study the problem of multi-robot target assignment to minimize the total distance traveled by the robots until they all reach an equal number of static targets. In the first half of the paper, we present a necessary and sufficient condition under which true distance optimality can be achieved for robots with limited communication and target-sensing ranges. Moreover, we provide an explicit, non-asymptotic formula for computing the number of robots needed to achieve distance optimality in terms of the robots' communication and target-sensing ranges with arbitrary guaranteed probabilities. The same bounds are also shown to be asymptotically tight. In the second half of the paper, we present suboptimal strategies for use when the number of robots cannot be chosen freely. Assuming first that all targets are known to all robots, we employ a hierarchical communication model in which robots communicate only with other robots in the same partitioned region. This hierarchical communication model leads to constant approximations of true distance-optimal solutions under mild assumptions. We then revisit the limited communication and sensing models. By combining simple rendezvous-based strategies with a hierarchical communication model, we obtain decentralized hierarchical strategies that achieve constant approximation ratios with respect to true distance optimality. Results of simulation show that the approximation ratio is as low as 1.4.