 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynthesizing Manipulation Sequences for Under-Specified Tasks using Unrolled Markov Random Fields
Paper and Code
Jun 24, 2014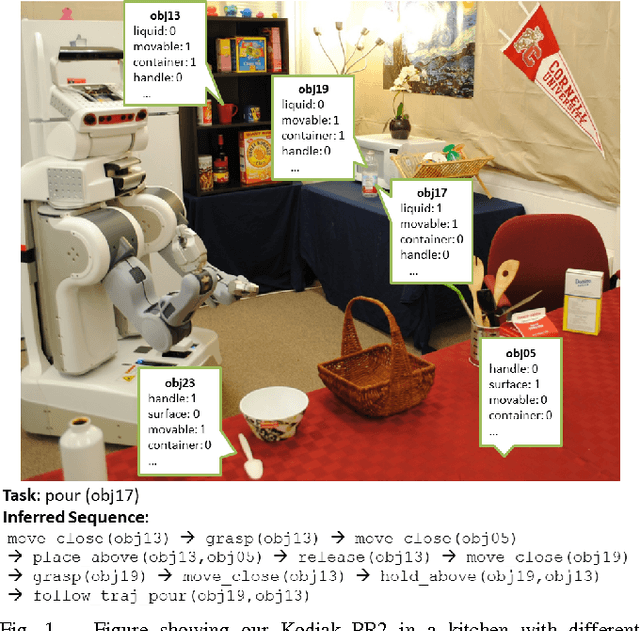
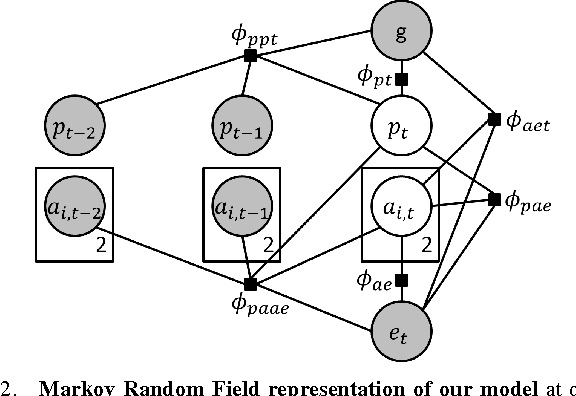
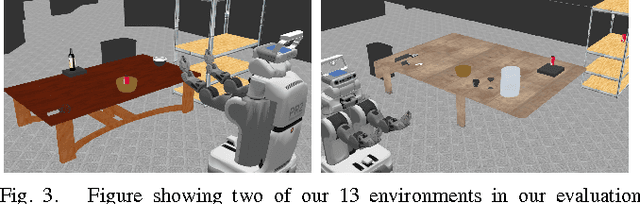
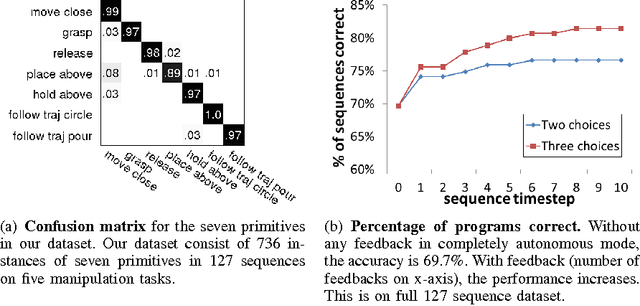
Many tasks in human environments require performing a sequence of navigation and manipulation steps involving objects. In unstructured human environments, the location and configuration of the objects involved often change in unpredictable ways. This requires a high-level planning strategy that is robust and flexible in an uncertain environment. We propose a novel dynamic planning strategy, which can be trained from a set of example sequences. High level tasks are expressed as a sequence of primitive actions or controllers (with appropriate parameters). Our score function, based on Markov Random Field (MRF), captures the relations between environment, controllers, and their arguments. By expressing the environment using sets of attributes, the approach generalizes well to unseen scenarios. We train the parameters of our MRF using a maximum margin learning method. We provide a detailed empirical validation of our overall framework demonstrating successful plan strategies for a variety of tasks.