Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSymmetry-Based Disentangled Representation Learning requires Interaction with Environments
Paper and Code


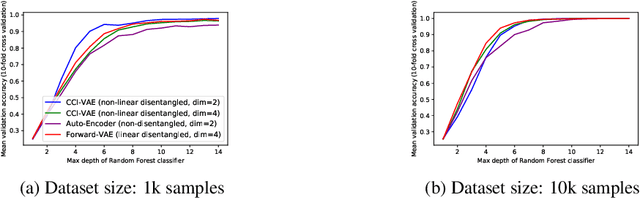
Finding a generally accepted formal definition of a disentangled representation in the context of an agent behaving in an environment is an important challenge towards the construction of data-efficient autonomous agents. Higgins et al. recently proposed Symmetry-Based Disentangled Representation Learning, a definition based on a characterization of symmetries in the environment using group theory. We build on their work and make observations, theoretical and empirical, that lead us to argue that Symmetry-Based Disentangled Representation Learning cannot only be based on fixed data samples. Agents should interact with the environment to discover its symmetries. All of our experiments can be reproduced on Colab: http://bit.do/eKpqv.
* Accepted to the workshop on Structure & Priors in Reinforcement
Learning at ICLR 2019
View paper on