 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSwiftLane: Towards Fast and Efficient Lane Detection
Paper and Code
Oct 22, 2021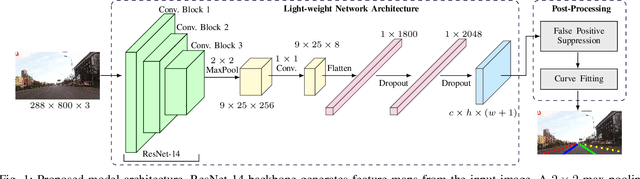

Recent work done on lane detection has been able to detect lanes accurately in complex scenarios, yet many fail to deliver real-time performance specifically with limited computational resources. In this work, we propose SwiftLane: a simple and light-weight, end-to-end deep learning based framework, coupled with the row-wise classification formulation for fast and efficient lane detection. This framework is supplemented with a false positive suppression algorithm and a curve fitting technique to further increase the accuracy. Our method achieves an inference speed of 411 frames per second, surpassing state-of-the-art in terms of speed while achieving comparable results in terms of accuracy on the popular CULane benchmark dataset. In addition, our proposed framework together with TensorRT optimization facilitates real-time lane detection on a Nvidia Jetson AGX Xavier as an embedded system while achieving a high inference speed of 56 frames per second.