 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurfing on an uncertain edge: Precision cutting of soft tissue using torque-based medium classification
Paper and Code
Sep 16, 2019

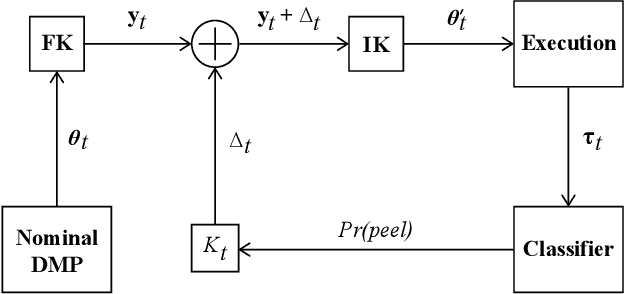
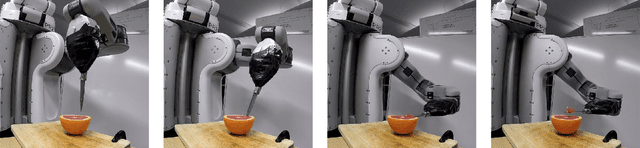
Precision cutting of soft-tissue remains a challenging problem in robotics, due to the complex and unpredictable mechanical behaviour of tissue under manipulation. Here, we consider the challenge of cutting along the boundary between two soft mediums, a problem that is made extremely difficult due to visibility constraints, which means that the precise location of the cutting trajectory is typically unknown. This paper introduces a novel strategy to address this task, using a binary medium classifier trained using joint torque measurements, and a closed loop control law that relies on an error signal compactly encoded in the decision boundary of the classifier. We illustrate this on a grapefruit cutting task, successfully modulating a nominal trajectory fit using dynamic movement primitives to follow the boundary between grapefruit pulp and peel using torque based medium classification. Results show that this control strategy is successful in 72 % of attempts in contrast to control using a nominal trajectory, which only succeeds in 50 % of attempts.