 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurface Edge Explorer (SEE): Planning Next Best Views Directly from 3D Observations
Paper and Code
Feb 23, 2018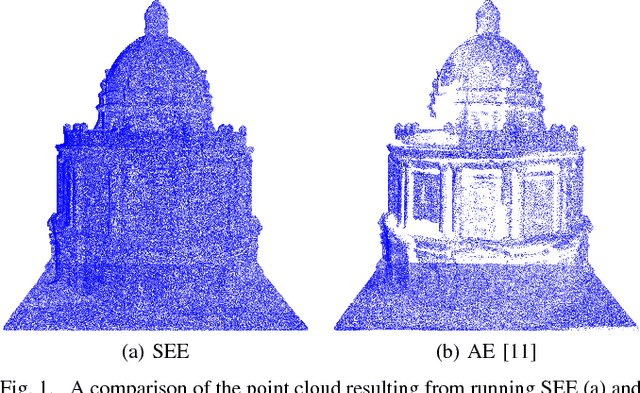

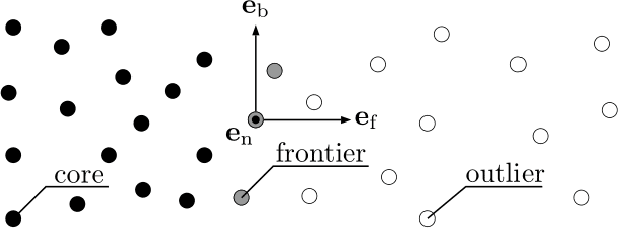
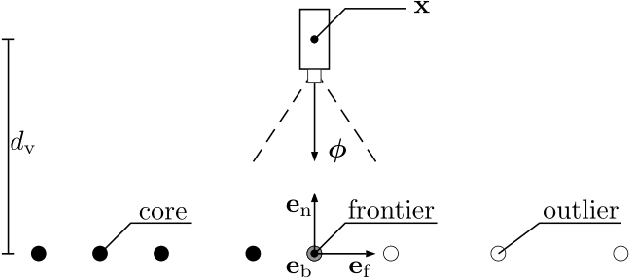
Surveying 3D scenes is a common task in robotics. Systems can do so autonomously by iteratively obtaining measurements. This process of planning observations to improve the model of a scene is called Next Best View (NBV) planning. NBV planning approaches often use either volumetric (e.g., voxel grids) or surface (e.g., triangulated meshes) representations. Volumetric approaches generalise well between scenes as they do not depend on surface geometry but do not scale to high-resolution models of large scenes. Surface representations can obtain high-resolution models at any scale but often require tuning of unintuitive parameters or multiple survey stages. This paper presents a scene-model-free NBV planning approach with a density representation. The Surface Edge Explorer (SEE) uses the density of current measurements to detect and explore observed surface boundaries. This approach is shown experimentally to provide better surface coverage in lower computation time than the evaluated state-of-the-art volumetric approaches while moving equivalent distances.