 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSubtask-Aware Visual Reward Learning from Segmented Demonstrations
Paper and Code
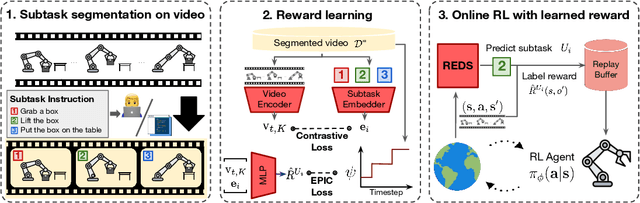
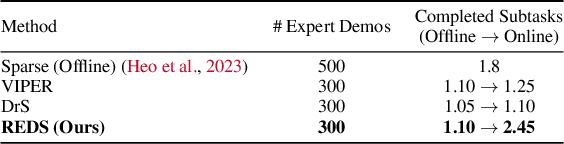
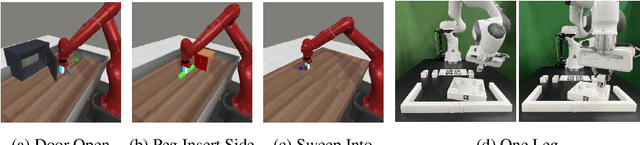

Reinforcement Learning (RL) agents have demonstrated their potential across various robotic tasks. However, they still heavily rely on human-engineered reward functions, requiring extensive trial-and-error and access to target behavior information, often unavailable in real-world settings. This paper introduces REDS: REward learning from Demonstration with Segmentations, a novel reward learning framework that leverages action-free videos with minimal supervision. Specifically, REDS employs video demonstrations segmented into subtasks from diverse sources and treats these segments as ground-truth rewards. We train a dense reward function conditioned on video segments and their corresponding subtasks to ensure alignment with ground-truth reward signals by minimizing the Equivalent-Policy Invariant Comparison distance. Additionally, we employ contrastive learning objectives to align video representations with subtasks, ensuring precise subtask inference during online interactions. Our experiments show that REDS significantly outperforms baseline methods on complex robotic manipulation tasks in Meta-World and more challenging real-world tasks, such as furniture assembly in FurnitureBench, with minimal human intervention. Moreover, REDS facilitates generalization to unseen tasks and robot embodiments, highlighting its potential for scalable deployment in diverse environments.