 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStructured Coupled Generative Adversarial Networks for Unsupervised Monocular Depth Estimation
Paper and Code

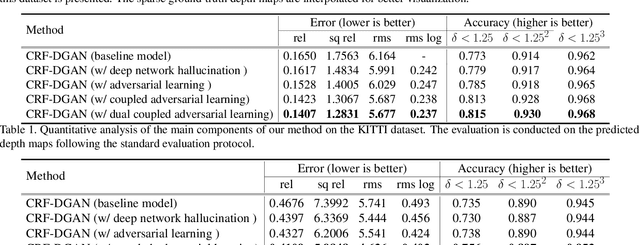


Inspired by the success of adversarial learning, we propose a new end-to-end unsupervised deep learning framework for monocular depth estimation consisting of two Generative Adversarial Networks (GAN), deeply coupled with a structured Conditional Random Field (CRF) model. The two GANs aim at generating distinct and complementary disparity maps and at improving the generation quality via exploiting the adversarial learning strategy. The deep CRF coupling model is proposed to fuse the generative and discriminative outputs from the dual GAN nets. As such, the model implicitly constructs mutual constraints on the two network branches and between the generator and discriminator. This facilitates the optimization of the whole network for better disparity generation. Extensive experiments on the KITTI, Cityscapes, and Make3D datasets clearly demonstrate the effectiveness of the proposed approach and show superior performance compared to state of the art methods. The code and models are available at https://github.com/mihaipuscas/ 3dv---coupled-crf-disparity.