 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSTRIPStream: Integrating Symbolic Planners and Blackbox Samplers
Paper and Code
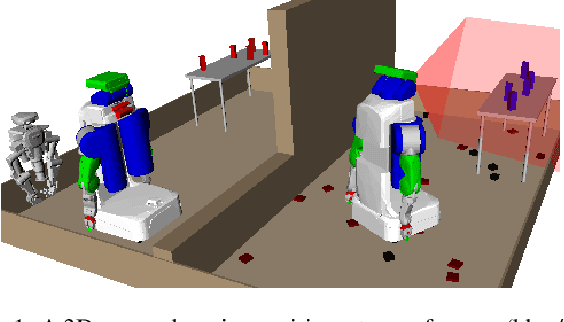

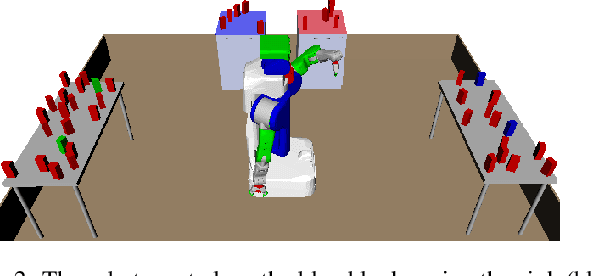
Many planning applications involve complex relationships defined on high-dimensional, continuous variables. For example, robotic manipulation requires planning with kinematic, collision, visibility, and motion constraints involving robot configurations, object transforms, and robot trajectories. These constraints typically require specialized procedures to sample satisfying values. We extend the STRIPS planning language to support a generic, declarative specification for these procedures while treating their implementation as black boxes. We also describe cost-sensitive planning within this framework. We provide several domain-independent algorithms that reduce STRIPStream problems to a sequence of finite-domain STRIPS planning problems. Finally, we evaluate our algorithms on three robotic planning domains.