 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStreet-View Image Generation from a Bird's-Eye View Layout
Paper and Code
Jan 16, 2023
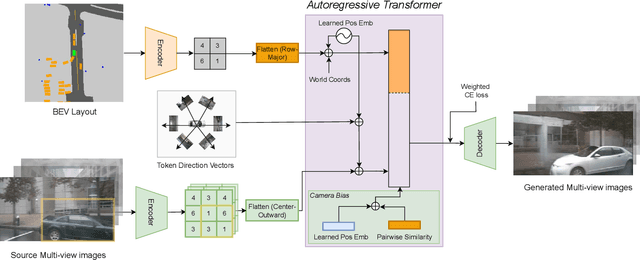
Bird's-Eye View (BEV) Perception has received increasing attention in recent years as it provides a concise and unified spatial representation across views and benefits a diverse set of downstream driving applications. While the focus has been placed on discriminative tasks such as BEV segmentation, the dual generative task of creating street-view images from a BEV layout has rarely been explored. The ability to generate realistic street-view images that align with a given HD map and traffic layout is critical for visualizing complex traffic scenarios and developing robust perception models for autonomous driving. In this paper, we propose BEVGen, a conditional generative model that synthesizes a set of realistic and spatially consistent surrounding images that match the BEV layout of a traffic scenario. BEVGen incorporates a novel cross-view transformation and spatial attention design which learn the relationship between cameras and map views to ensure their consistency. Our model can accurately render road and lane lines, as well as generate traffic scenes under different weather conditions and times of day. The code will be made publicly available.