 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStochastic Variance Reduction for Policy Gradient Estimation
Paper and Code

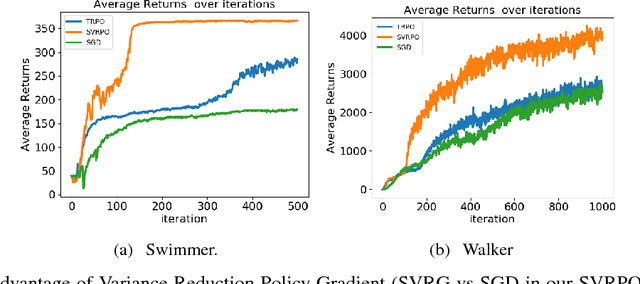
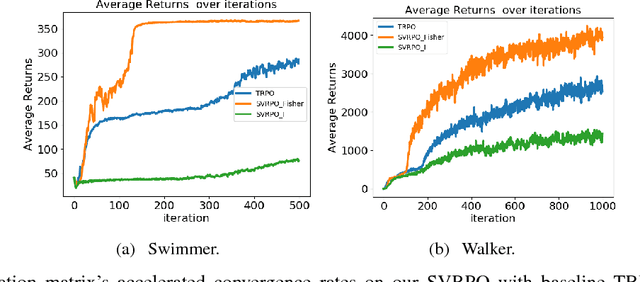

Recent advances in policy gradient methods and deep learning have demonstrated their applicability for complex reinforcement learning problems. However, the variance of the performance gradient estimates obtained from the simulation is often excessive, leading to poor sample efficiency. In this paper, we apply the stochastic variance reduced gradient descent (SVRG) to model-free policy gradient to significantly improve the sample-efficiency. The SVRG estimation is incorporated into a trust-region Newton conjugate gradient framework for the policy optimization. On several Mujoco tasks, our method achieves significantly better performance compared to the state-of-the-art model-free policy gradient methods in robotic continuous control such as trust region policy optimization (TRPO)