 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSTLCCP: An Efficient Convex Optimization-based Framework for Signal Temporal Logic Specifications
Paper and Code
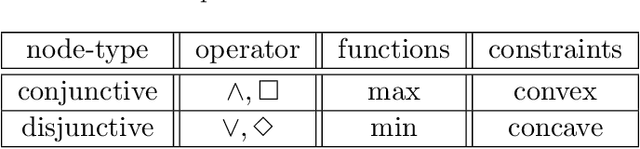


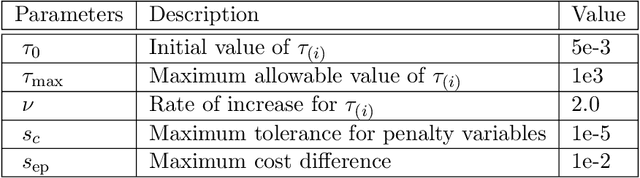
Signal Temporal Logic (STL) is capable of expressing a broad range of temporal properties that controlled dynamical systems must satisfy. In the literature, both mixed-integer programming (MIP) and nonlinear programming (NLP) methods have been applied to solve optimal control problems with STL specifications. However, neither approach has succeeded in solving problems with complex long-horizon STL specifications within a realistic timeframe. This study proposes a new optimization framework, called \textit{STLCCP}, which explicitly incorporates several structures of STL to mitigate this issue. The core of our framework is a structure-aware decomposition of STL formulas, which converts the original program into a difference of convex (DC) programs. This program is then solved as a convex quadratic program sequentially, based on the convex-concave procedure (CCP). Our numerical experiments on several commonly used benchmarks demonstrate that this framework can effectively handle complex scenarios over long horizons, which have been challenging to address even using state-of-the-art optimization methods.