 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStereOBJ-1M: Large-scale Stereo Image Dataset for 6D Object Pose Estimation
Paper and Code
Sep 22, 2021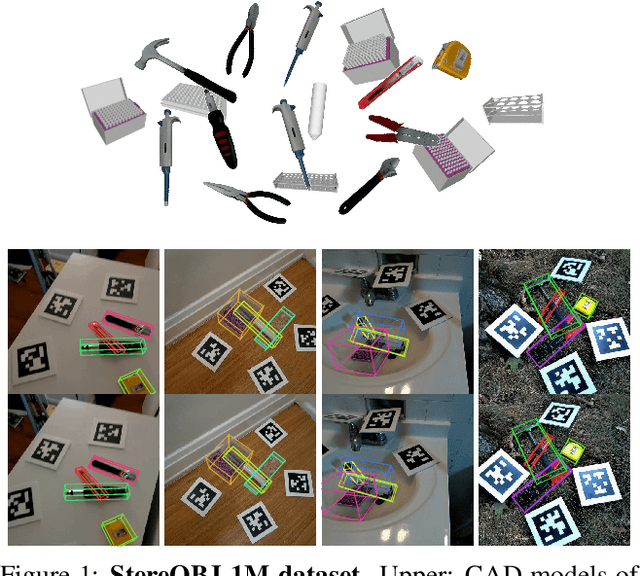

We present a large-scale stereo RGB image object pose estimation dataset named the $\textbf{StereOBJ-1M}$ dataset. The dataset is designed to address challenging cases such as object transparency, translucency, and specular reflection, in addition to the common challenges of occlusion, symmetry, and variations in illumination and environments. In order to collect data of sufficient scale for modern deep learning models, we propose a novel method for efficiently annotating pose data in a multi-view fashion that allows data capturing in complex and flexible environments. Fully annotated with 6D object poses, our dataset contains over 396K frames and over 1.5M annotations of 18 objects recorded in 183 scenes constructed in 11 different environments. The 18 objects include 8 symmetric objects, 7 transparent objects, and 8 reflective objects. We benchmark two state-of-the-art pose estimation frameworks on StereOBJ-1M as baselines for future work. We also propose a novel object-level pose optimization method for computing 6D pose from keypoint predictions in multiple images.