 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSteering a Predator Robot using a Mixed Frame/Event-Driven Convolutional Neural Network
Paper and Code
Jun 30, 2016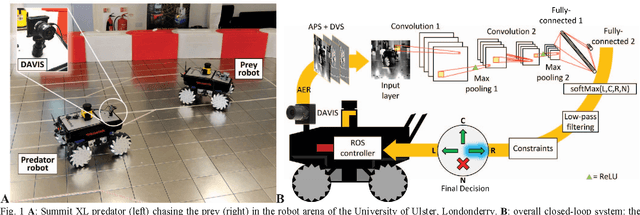
This paper describes the application of a Convolutional Neural Network (CNN) in the context of a predator/prey scenario. The CNN is trained and run on data from a Dynamic and Active Pixel Sensor (DAVIS) mounted on a Summit XL robot (the predator), which follows another one (the prey). The CNN is driven by both conventional image frames and dynamic vision sensor "frames" that consist of a constant number of DAVIS ON and OFF events. The network is thus "data driven" at a sample rate proportional to the scene activity, so the effective sample rate varies from 15 Hz to 240 Hz depending on the robot speeds. The network generates four outputs: steer right, left, center and non-visible. After off-line training on labeled data, the network is imported on the on-board Summit XL robot which runs jAER and receives steering directions in real time. Successful results on closed-loop trials, with accuracies up to 87% or 92% (depending on evaluation criteria) are reported. Although the proposed approach discards the precise DAVIS event timing, it offers the significant advantage of compatibility with conventional deep learning technology without giving up the advantage of data-driven computing.