Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeState estimation under non-Gaussian Levy noise: A modified Kalman filtering method
Paper and Code
Mar 10, 2013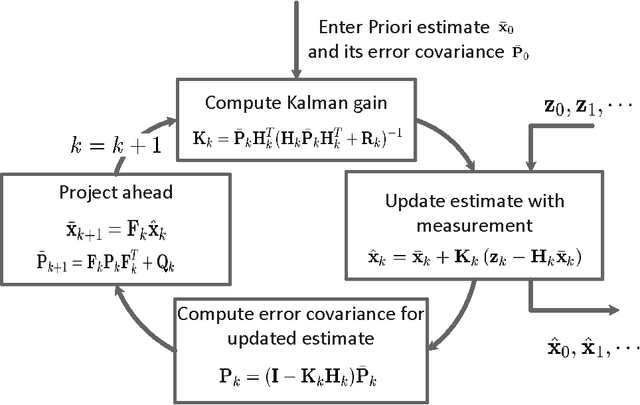
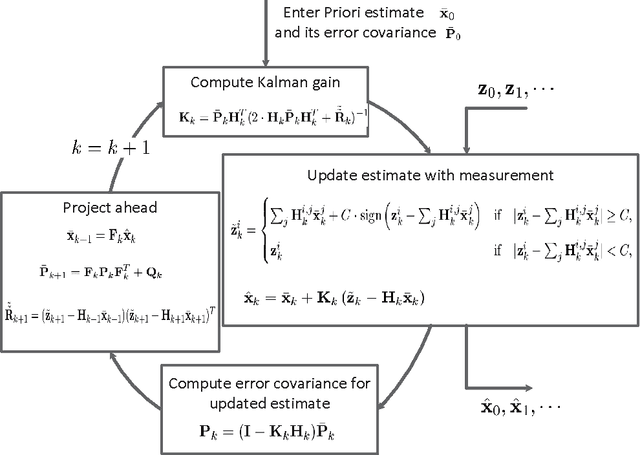
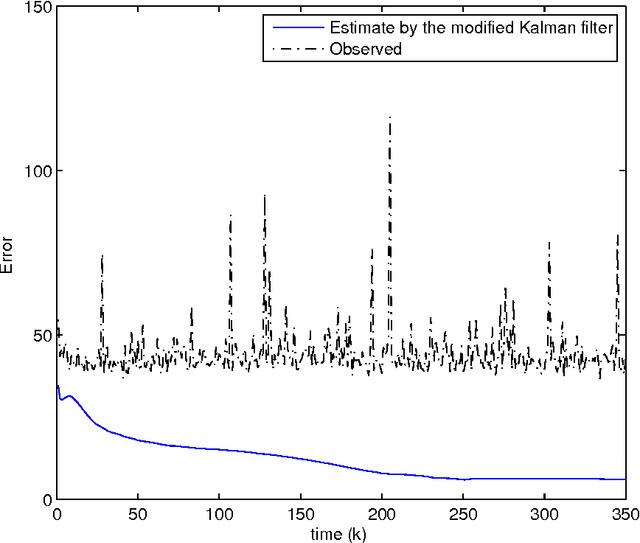
The Kalman filter is extensively used for state estimation for linear systems under Gaussian noise. When non-Gaussian L\'evy noise is present, the conventional Kalman filter may fail to be effective due to the fact that the non-Gaussian L\'evy noise may have infinite variance. A modified Kalman filter for linear systems with non-Gaussian L\'evy noise is devised. It works effectively with reasonable computational cost. Simulation results are presented to illustrate this non-Gaussian filtering method.
View paper on