 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpherical Interpolated Convolutional Network with Distance-Feature Density for 3D Semantic Segmentation of Point Clouds
Paper and Code
Nov 27, 2020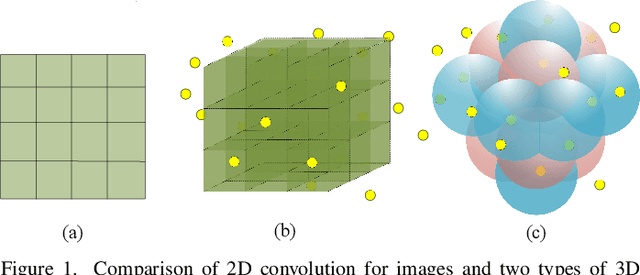
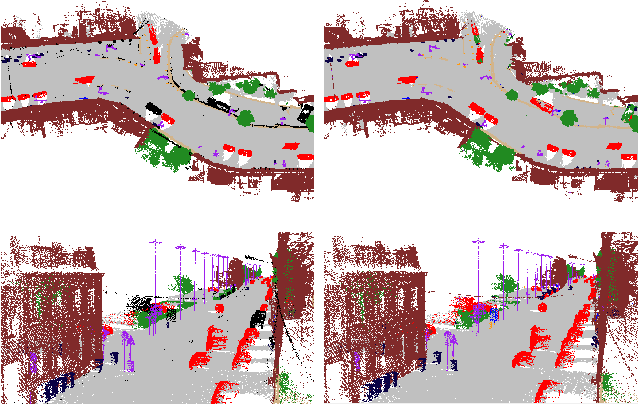
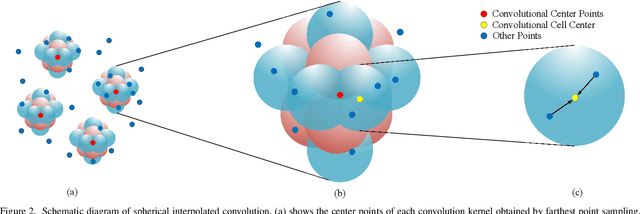
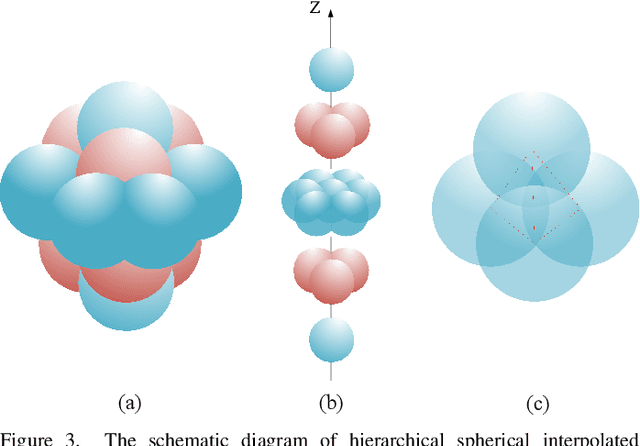
The semantic segmentation of point clouds is an important part of the environment perception for robots. However, it is difficult to directly adopt the traditional 3D convolution kernel to extract features from raw 3D point clouds because of the unstructured property of point clouds. In this paper, a spherical interpolated convolution operator is proposed to replace the traditional grid-shaped 3D convolution operator. This newly proposed feature extraction operator improves the accuracy of the network and reduces the parameters of the network. In addition, this paper analyzes the defect of point cloud interpolation methods based on the distance as the interpolation weight and proposes the self-learned distance-feature density by combining the distance and the feature correlation. The proposed method makes the feature extraction of spherical interpolated convolution network more rational and effective. The effectiveness of the proposed network is demonstrated on the 3D semantic segmentation task of point clouds. Experiments show that the proposed method achieves good performance on the ScanNet dataset and Paris-Lille-3D dataset.