 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpeeding Up Iterative Closest Point Using Stochastic Gradient Descent
Paper and Code
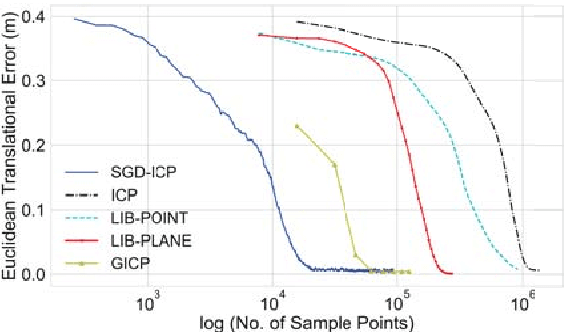
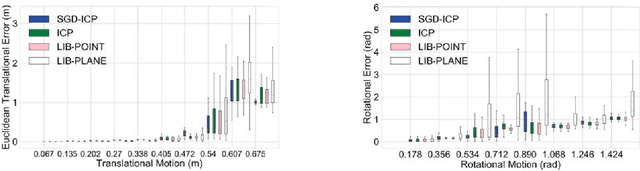
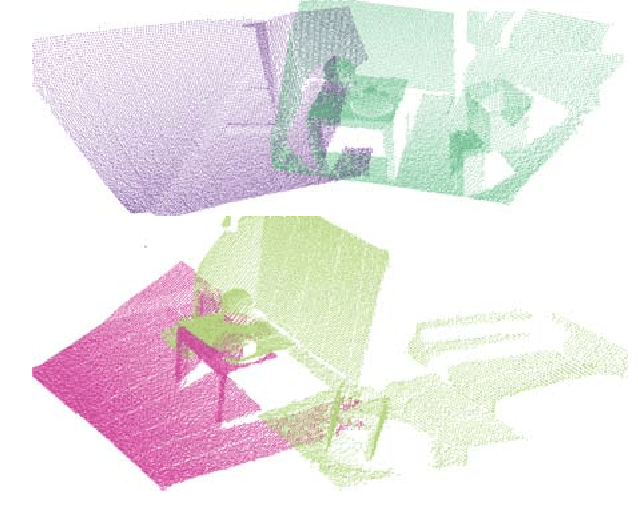
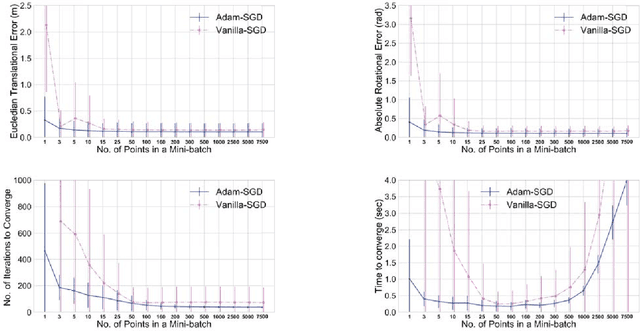
Sensors producing 3D point clouds such as 3D laser scanners and RGB-D cameras are widely used in robotics, be it for autonomous driving or manipulation. Aligning point clouds produced by these sensors is a vital component in such applications to perform tasks such as model registration, pose estimation, and SLAM. Iterative closest point (ICP) is the most widely used method for this task, due to its simplicity and efficiency. In this paper we propose a novel method which solves the optimisation problem posed by ICP using stochastic gradient descent (SGD). Using SGD allows us to improve the convergence speed of ICP without sacrificing solution quality. Experiments using Kinect as well as Velodyne data show that, our proposed method is faster than existing methods, while obtaining solutions comparable to standard ICP. An additional benefit is robustness to parameters when processing data from different sensors.