Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpecifying and achieving goals in open uncertain robot-manipulation domains
Paper and Code
Dec 21, 2021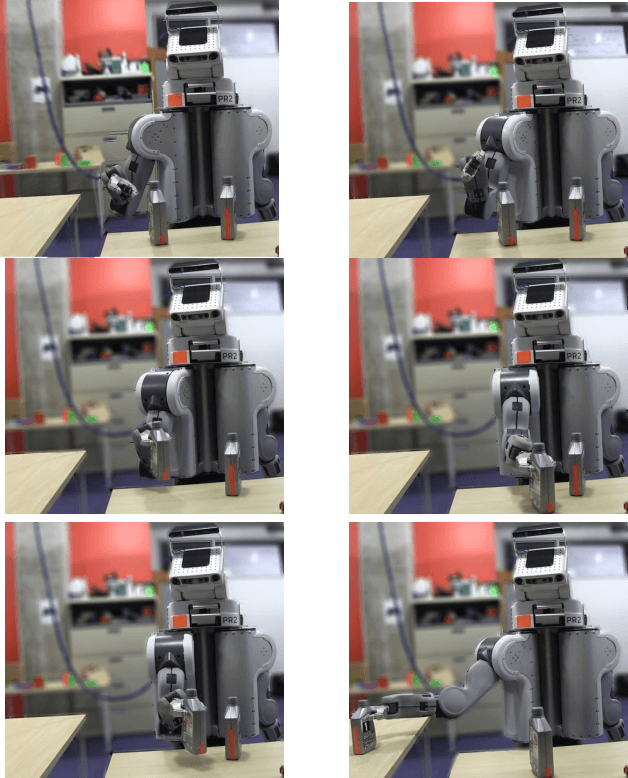
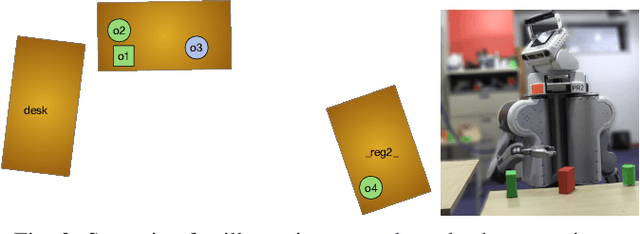
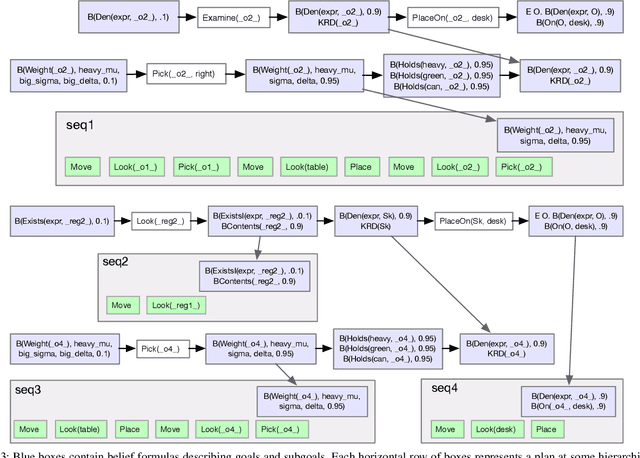
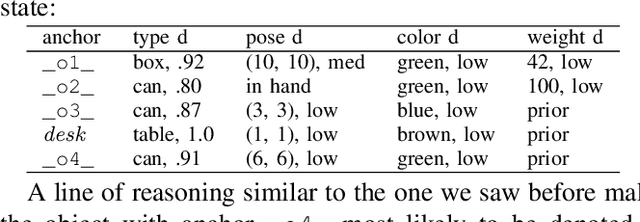
This paper describes an integrated solution to the problem of describing and interpreting goals for robots in open uncertain domains. Given a formal specification of a desired situation, in which objects are described only by their properties, general-purpose planning and reasoning tools are used to derive appropriate actions for a robot. These goals are carried out through an online combination of hierarchical planning, state-estimation, and execution that operates robustly in real robot domains with substantial occlusion and sensing error.
* Paper completed in 2019
View paper on