 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpecification-Guided Learning of Nash Equilibria with High Social Welfare
Paper and Code
Jun 06, 2022
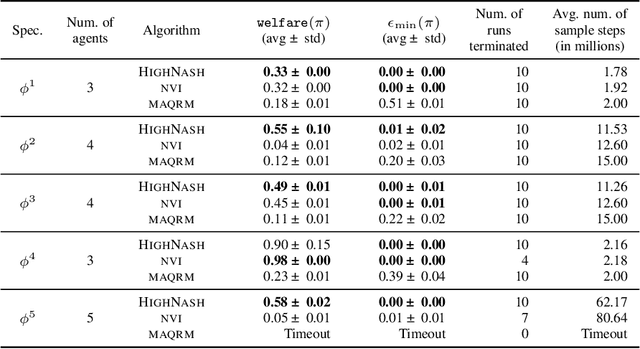

Reinforcement learning has been shown to be an effective strategy for automatically training policies for challenging control problems. Focusing on non-cooperative multi-agent systems, we propose a novel reinforcement learning framework for training joint policies that form a Nash equilibrium. In our approach, rather than providing low-level reward functions, the user provides high-level specifications that encode the objective of each agent. Then, guided by the structure of the specifications, our algorithm searches over policies to identify one that provably forms an $\epsilon$-Nash equilibrium (with high probability). Importantly, it prioritizes policies in a way that maximizes social welfare across all agents. Our empirical evaluation demonstrates that our algorithm computes equilibrium policies with high social welfare, whereas state-of-the-art baselines either fail to compute Nash equilibria or compute ones with comparatively lower social welfare.