 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatiotemporal Articulated Models for Dynamic SLAM
Paper and Code
Apr 12, 2016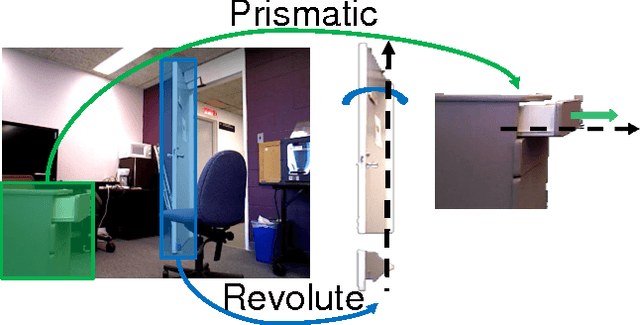
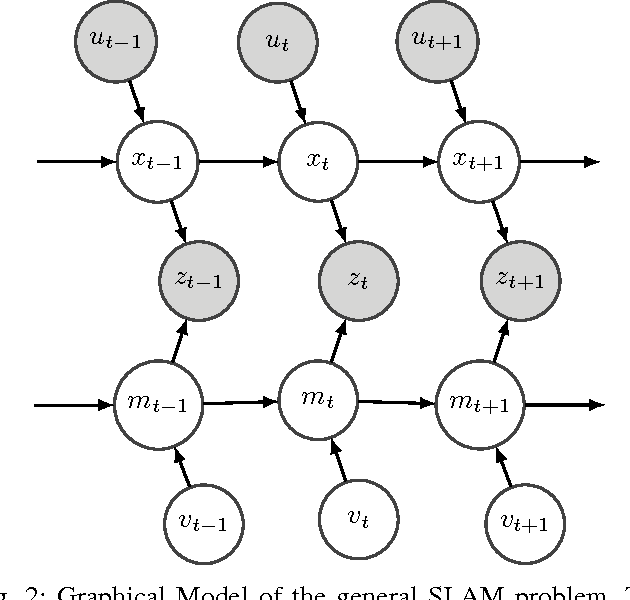
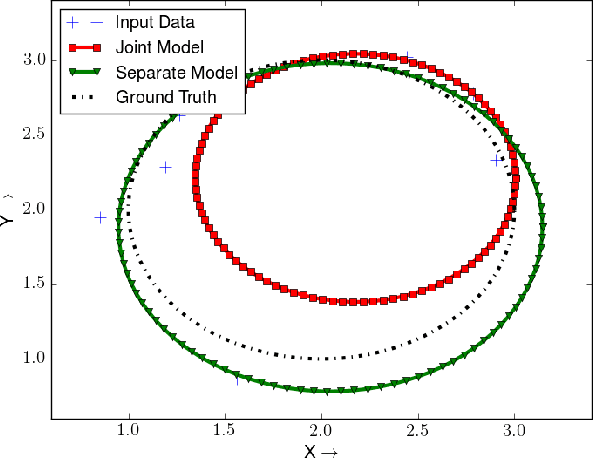

We propose an online spatiotemporal articulation model estimation framework that estimates both articulated structure as well as a temporal prediction model solely using passive observations. The resulting model can predict future mo- tions of an articulated object with high confidence because of the spatial and temporal structure. We demonstrate the effectiveness of the predictive model by incorporating it within a standard simultaneous localization and mapping (SLAM) pipeline for mapping and robot localization in previously unexplored dynamic environments. Our method is able to localize the robot and map a dynamic scene by explaining the observed motion in the world. We demonstrate the effectiveness of the proposed framework for both simulated and real-world dynamic environments.