 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatialFlow: Bridging All Tasks for Panoptic Segmentation
Paper and Code
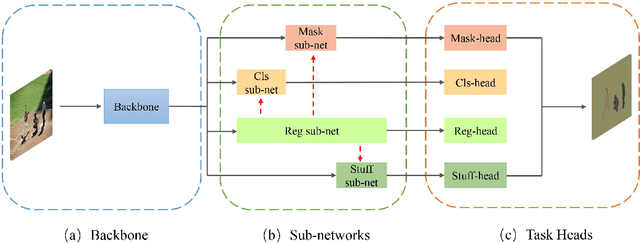
Object location is fundamental to panoptic segmentation as it is related to all things and stuff. How to integrate object location in both thing and stuff segmentation is a crucial problem. In this paper, we propose object spatial information flows to achieve this objective. More importantly, we design four parallel sub-networks for sub-tasks in panoptic segmentation, which leads to the preferable adaptation of object spatial information. With sub-networks, the flows can bridge all tasks together by delivering the object's spatial context from the box regression task to others. They can also provide clues for segmenting both things and stuff, which helps the network better understand the whole image. Upon the sub-networks and the flows, we present a location-aware and unified framework for panoptic segmentation, denoted as SpatialFlow. We perform a detailed ablation study on each component and conduct extensive experiments to prove the effectiveness of Our SpatialFlow. Furthermore, we achieve state-of-the-art results, which are $47.3$ PQ and $62.5$ PQ respectively on MS-COCO and Cityscapes panoptic benchmarks.