 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSparse Beats Dense: Rethinking Supervision in Radar-Camera Depth Completion
Paper and Code
Dec 08, 2023
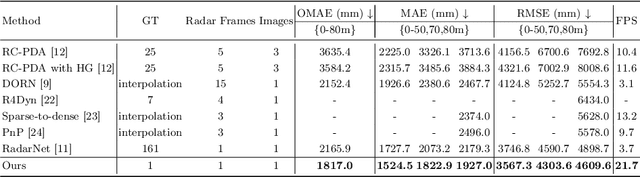


It is widely believed that the dense supervision is better than the sparse supervision in the field of depth completion, but the underlying reasons for this are rarely discussed. In this paper, we find that the challenge of using sparse supervision for training Radar-Camera depth prediction models is the Projection Transformation Collapse (PTC). The PTC implies that sparse supervision leads the model to learn unexpected collapsed projection transformations between Image/Radar/LiDAR spaces. Building on this insight, we propose a novel ``Disruption-Compensation" framework to handle the PTC, thereby relighting the use of sparse supervision in depth completion tasks. The disruption part deliberately discards position correspondences among Image/Radar/LiDAR, while the compensation part leverages 3D spatial and 2D semantic information to compensate for the discarded beneficial position correspondence. Extensive experimental results demonstrate that our framework (sparse supervision) outperforms the state-of-the-art (dense supervision) with 11.6$\%$ improvement in mean absolute error and $1.6 \times$ speedup. The code is available at ...