 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSOLO: A Simple Framework for Instance Segmentation
Paper and Code

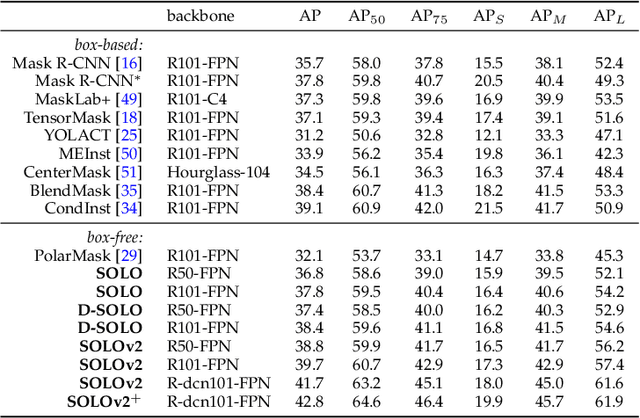


Compared to many other dense prediction tasks, e.g., semantic segmentation, it is the arbitrary number of instances that has made instance segmentation much more challenging. In order to predict a mask for each instance, mainstream approaches either follow the 'detect-then-segment' strategy (e.g., Mask R-CNN), or predict embedding vectors first then cluster pixels into individual instances. In this paper, we view the task of instance segmentation from a completely new perspective by introducing the notion of "instance categories", which assigns categories to each pixel within an instance according to the instance's location. With this notion, we propose segmenting objects by locations (SOLO), a simple, direct, and fast framework for instance segmentation with strong performance. We derive a few SOLO variants (e.g., Vanilla SOLO, Decoupled SOLO, Dynamic SOLO) following the basic principle. Our method directly maps a raw input image to the desired object categories and instance masks, eliminating the need for the grouping post-processing or the bounding box detection. Our approach achieves state-of-the-art results for instance segmentation in terms of both speed and accuracy, while being considerably simpler than the existing methods. Besides instance segmentation, our method yields state-of-the-art results in object detection (from our mask byproduct) and panoptic segmentation. We further demonstrate the flexibility and high-quality segmentation of SOLO by extending it to perform one-stage instance-level image matting. Code is available at: https://git.io/AdelaiDet