 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoilingNet: Soiling Detection on Automotive Surround-View Cameras
Paper and Code
May 04, 2019
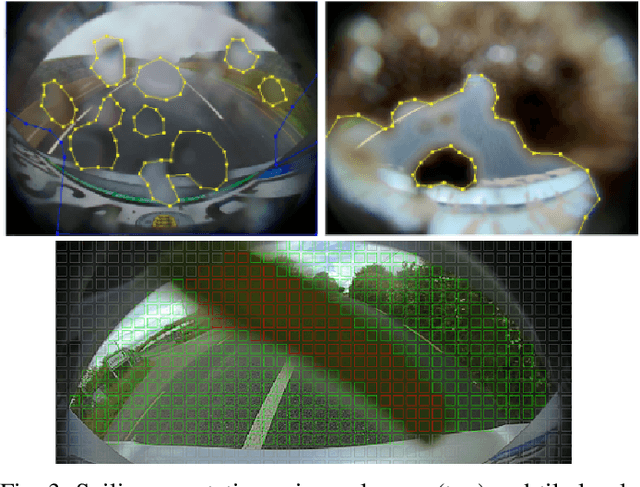
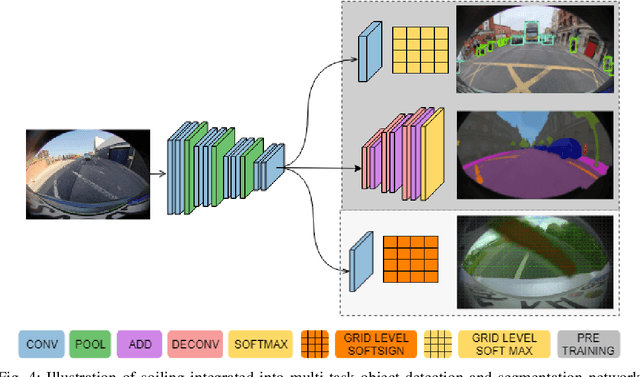
Cameras are an essential part of sensor suite in autonomous driving. Surround-view cameras are directly exposed to external environment and are vulnerable to get soiled. Cameras have a much higher degradation in performance due to soiling compared to other sensors. Thus it is critical to accurately detect soiling on the cameras, particularly for higher levels of autonomous driving. We created a new dataset having multiple types of soiling namely opaque and transparent. As there is no public dataset available for this task, we will release a public dataset to encourage further research. We demonstrate high accuracy using a Convolutional Neural Network (CNN) based architecture. We also show that it can be combined with the existing object detection task in a multi-task learning framework. Finally, we make use of Generative Adversarial Networks (GANs) to generate more images for data augmentation and show that it works successfully similar to the style transfer.