 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSOIC: Semantic Online Initialization and Calibration for LiDAR and Camera
Paper and Code
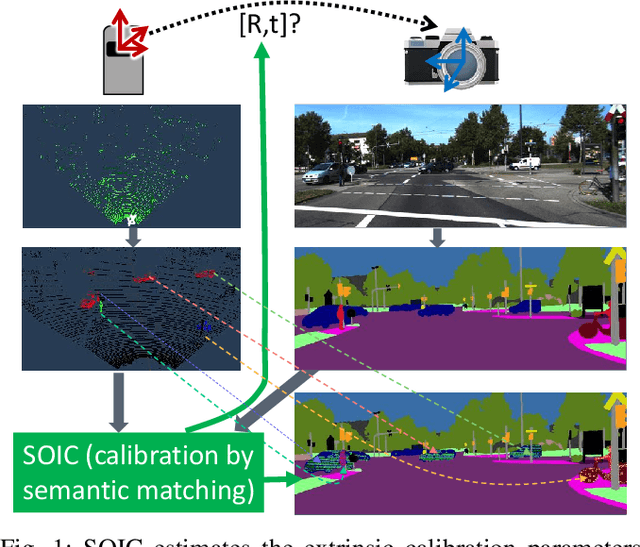
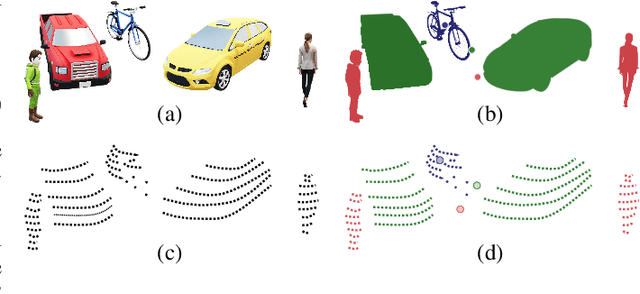
This paper presents a novel semantic-based online extrinsic calibration approach, SOIC (so, I see), for Light Detection and Ranging (LiDAR) and camera sensors. Previous online calibration methods usually need prior knowledge of rough initial values for optimization. The proposed approach removes this limitation by converting the initialization problem to a Perspective-n-Point (PnP) problem with the introduction of semantic centroids (SCs). The closed-form solution of this PnP problem has been well researched and can be found with existing PnP methods. Since the semantic centroid of the point cloud usually does not accurately match with that of the corresponding image, the accuracy of parameters are not improved even after a nonlinear refinement process. Thus, a cost function based on the constraint of the correspondence between semantic elements from both point cloud and image data is formulated. Subsequently, optimal extrinsic parameters are estimated by minimizing the cost function. We evaluate the proposed method either with GT or predicted semantics on KITTI dataset. Experimental results and comparisons with the baseline method verify the feasibility of the initialization strategy and the accuracy of the calibration approach. In addition, we release the source code at https://github.com/--/SOIC.