 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSocial navigation with human empowerment driven reinforcement learning
Paper and Code
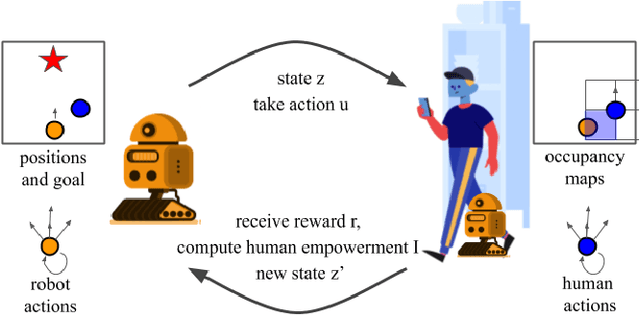

The next generation of mobile robots needs to be socially-compliant to be accepted by humans. As simple as this task may seem, defining compliance formally is not trivial. Yet, classical reinforcement learning (RL) relies upon hard-coded reward signals. In this work, we go beyond this approach and provide the agent with intrinsic motivation using empowerment. Empowerment maximizes the influence of an agent on its near future and has been shown to be a good model for biological behaviors. It also has been used for artificial agents to learn complicated and generalized actions. Self-empowerment maximizes the influence of an agent on its future. On the contrary, our robot strives for the empowerment of people in its environment, so they are not disturbed by the robot when pursuing their goals. We show that our robot has a positive influence on humans, as it minimizes the travel time and distance of humans while moving efficiently to its own goal. The method can be used in any multi-agent system that requires a robot to solve a particular task involving humans interactions.