 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSnowflake: Scaling GNNs to High-Dimensional Continuous Control via Parameter Freezing
Paper and Code

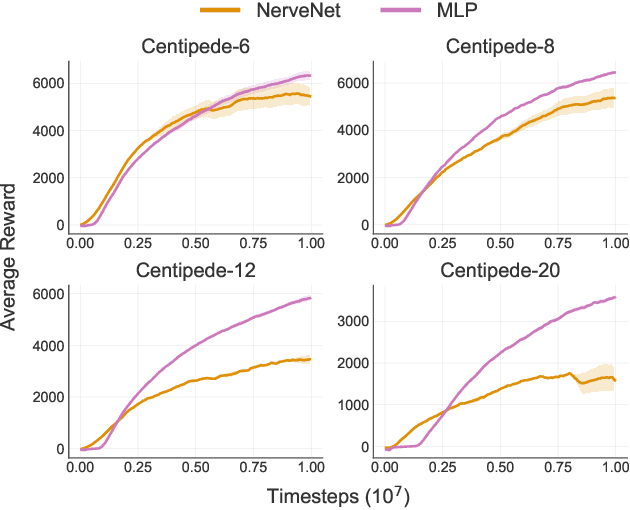
Recent research has shown that Graph Neural Networks (GNNs) can learn policies for locomotion control that are as effective as a typical multi-layer perceptron (MLP), with superior transfer and multi-task performance (Wang et al., 2018; Huang et al., 2020). Results have so far been limited to training on small agents, with the performance of GNNs deteriorating rapidly as the number of sensors and actuators grows. A key motivation for the use of GNNs in the supervised learning setting is their applicability to large graphs, but this benefit has not yet been realised for locomotion control. We identify the weakness with a common GNN architecture that causes this poor scaling: overfitting in the MLPs within the network that encode, decode, and propagate messages. To combat this, we introduce Snowflake, a GNN training method for high-dimensional continuous control that freezes parameters in parts of the network that suffer from overfitting. Snowflake significantly boosts the performance of GNNs for locomotion control on large agents, now matching the performance of MLPs, and with superior transfer properties.