 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSNE-RoadSeg+: Rethinking Depth-Normal Translation and Deep Supervision for Freespace Detection
Paper and Code
Jul 30, 2021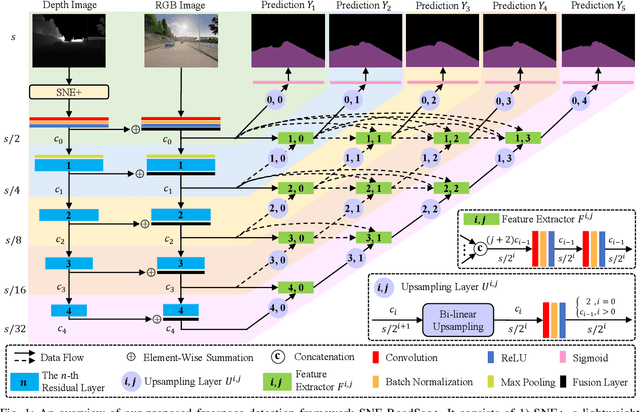
Freespace detection is a fundamental component of autonomous driving perception. Recently, deep convolutional neural networks (DCNNs) have achieved impressive performance for this task. In particular, SNE-RoadSeg, our previously proposed method based on a surface normal estimator (SNE) and a data-fusion DCNN (RoadSeg), has achieved impressive performance in freespace detection. However, SNE-RoadSeg is computationally intensive, and it is difficult to execute in real time. To address this problem, we introduce SNE-RoadSeg+, an upgraded version of SNE-RoadSeg. SNE-RoadSeg+ consists of 1) SNE+, a module for more accurate surface normal estimation, and 2) RoadSeg+, a data-fusion DCNN that can greatly minimize the trade-off between accuracy and efficiency with the use of deep supervision. Extensive experimental results have demonstrated the effectiveness of our SNE+ for surface normal estimation and the superior performance of our SNE-RoadSeg+ over all other freespace detection approaches. Specifically, our SNE-RoadSeg+ runs in real time, and meanwhile, achieves the state-of-the-art performance on the KITTI road benchmark. Our project page is at https://www.sne-roadseg.site/sne-roadseg-plus.