 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSkin Normal Force Calibration Using Vacuum Bags
Paper and Code
Sep 30, 2016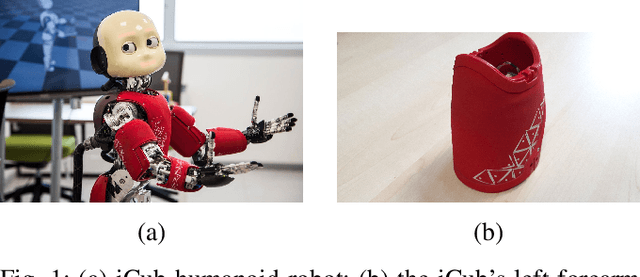
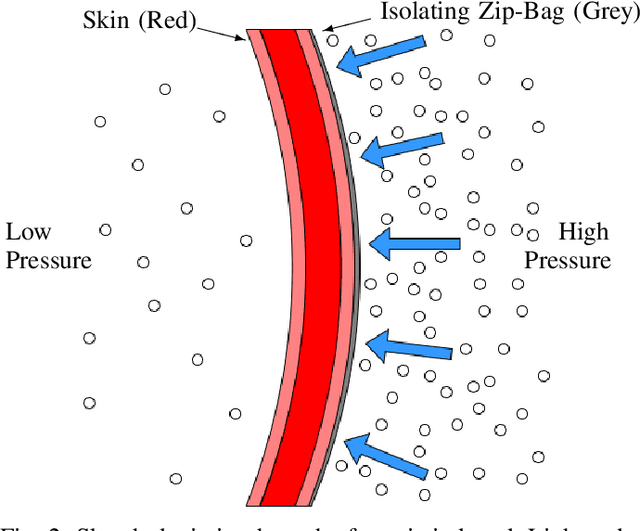
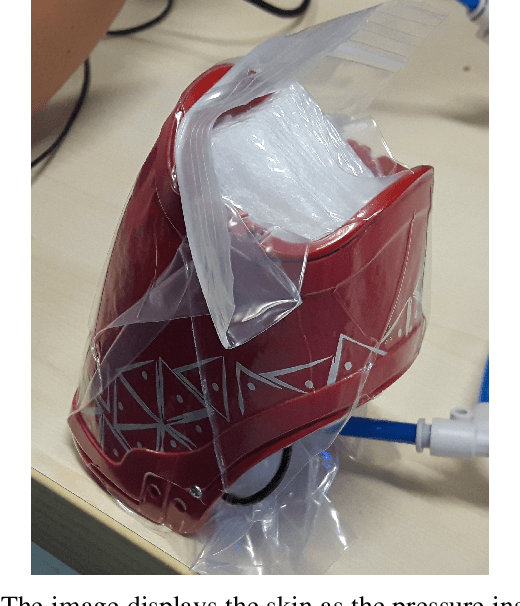
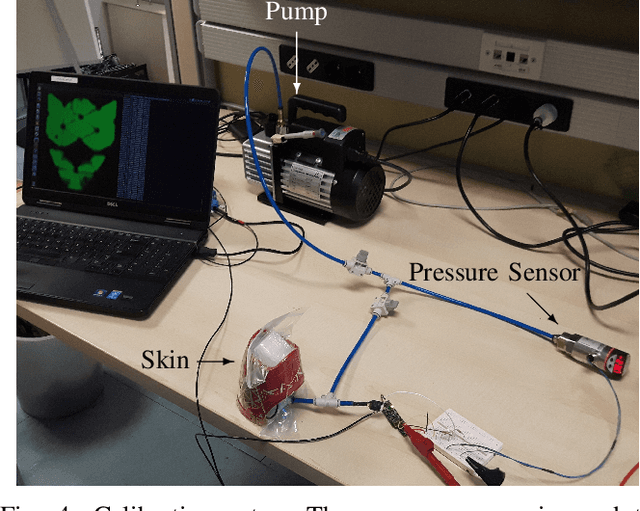
The paper presents a proof of concept to calibrate iCub's skin using vacuum bags. The method's main idea consists in inserting the skin in a vacuum bag, and then decreasing the pressure in the bag to create a uniform pressure distribution on the skin surface. Acquisition and data processing of the bag pressure and sensors' measured capacitance allow us to characterize the relationship between the pressure and the measured capacitance of each sensor. After calibration, integration of the pressure distribution over the skin geometry provides us with the net normal force applied to the skin. Experiments are conducted using the forearm skin of the iCub humanoid robot, and validation results indicate acceptable average errors in force prediction.