 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSKD: Unsupervised Keypoint Detecting for Point Clouds using Embedded Saliency Estimation
Paper and Code
Dec 10, 2019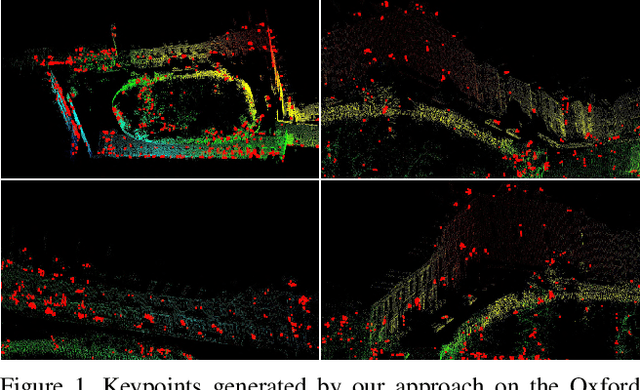
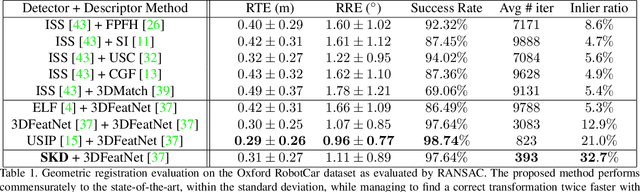
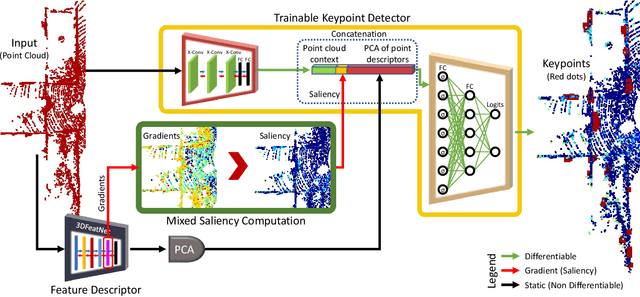

In this work we present a novel keypoint detector that uses saliency to determine the best candidates from point clouds. The approach can be applied to any differentiable deep learning descriptor by using the gradients of that descriptor with respect to the input to estimate an initial set of candidate keypoints. By using a neural network over the set of candidates we further learn to refine the point selection until the actual keypoints are obtained. The key intuition behind this approach is that keypoints need to be determined based on how the descriptor behaves and not just on the geometry that surrounds a point. To improve the performance of the learned keypoint descriptor we combine the saliency, the feature signal and geometric information from the point cloud to allow the network to select good keypoint candidates. The approach was evaluated on the two largest LIDAR datasets - the Oxford RobotCar dataset and the KITTI dataset, where we obtain up to 50% improvement over the state-of-the-art in both matchability score and repeatability.