Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSingularity Analysis of Lower-Mobility Parallel Manipulators Using Grassmann-Cayley Algebra
Paper and Code
Oct 21, 2009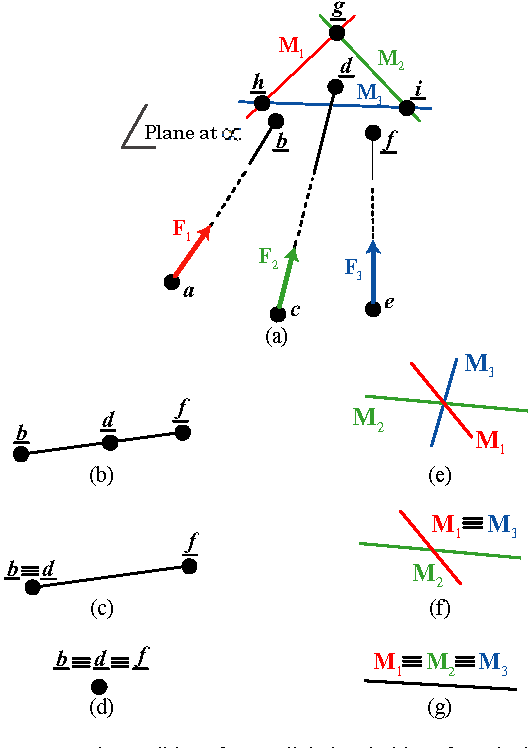
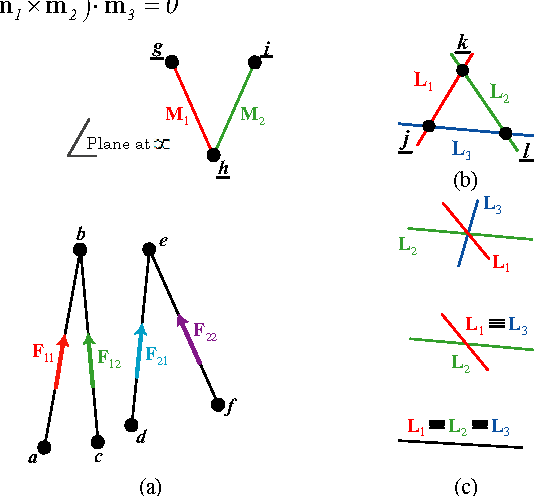
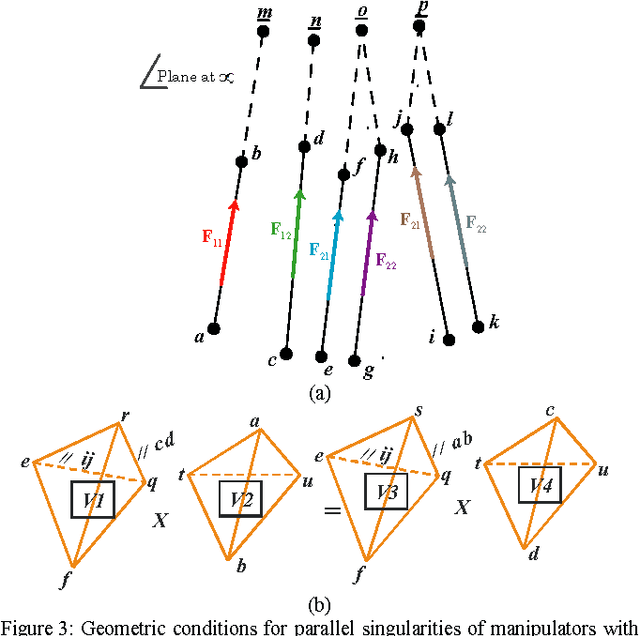
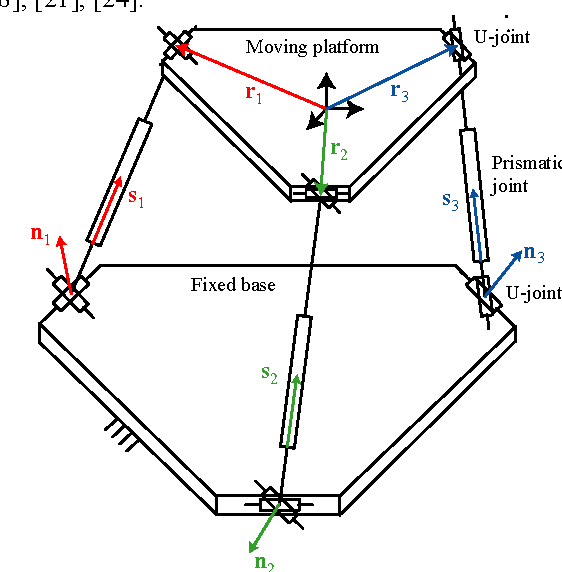
This paper introduces a methodology to analyze geometrically the singularities of manipulators, of which legs apply both actuation forces and constraint moments to their moving platform. Lower-mobility parallel manipulators and parallel manipulators, of which some legs do not have any spherical joint, are such manipulators. The geometric conditions associated with the dependency of six Pl\"ucker vectors of finite lines or lines at infinity constituting the rows of the inverse Jacobian matrix are formulated using Grassmann-Cayley Algebra. Accordingly, the singularity conditions are obtained in vector form. This study is illustrated with the singularity analysis of four manipulators.
* IEEE Transactions on Robotics 25, 5 (2009) 995-1004
View paper on