 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulation of Parallel-Jaw Grasping using Incremental Potential Contact Models
Paper and Code
Nov 02, 2021
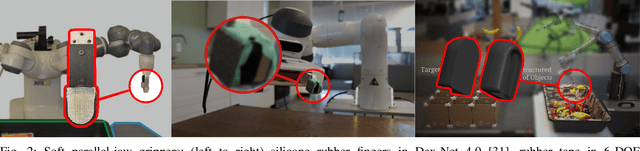
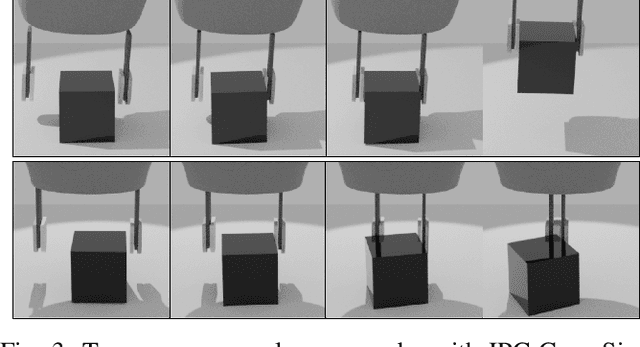
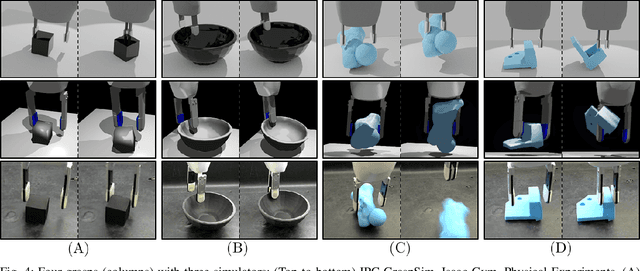
Soft compliant jaw tips are almost universally used with parallel-jaw robot grippers due to their ability to increase contact area and friction between the jaws and the object to be manipulated. However, interactions between the compliant surfaces and rigid objects are notoriously difficult to model. We introduce IPC-GraspSim, a novel simulator using Incremental Potential Contact (IPC) - a deformation model developed in 2020 for computer graphics - that models both the dynamics and the deformation of compliant jaw tips during grasping. IPC-GraspSim is evaluated using a set of 2,000 physical grasps across 16 adversarial objects where standard analytic models perform poorly. In comparison to both analytic quasistatic contact models (soft point contact, REACH, 6DFC) and dynamic grasp simulators (Isaac Gym with FleX backend), results suggest that IPC-GraspSim more accurately models real-world grasps, increasing F1 score by 9%. All data, code, videos, and supplementary material are available at https://sites.google.com/berkeley.edu/ipcgraspsim.