 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSignal Alignment for Humanoid Skeletons via the Globally Optimal Reparameterization Algorithm
Paper and Code
Jul 20, 2018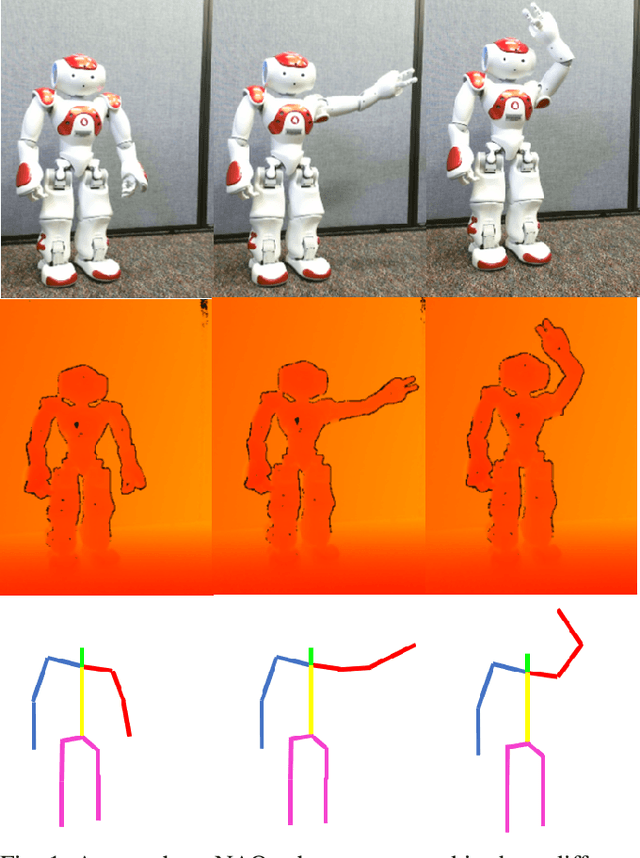
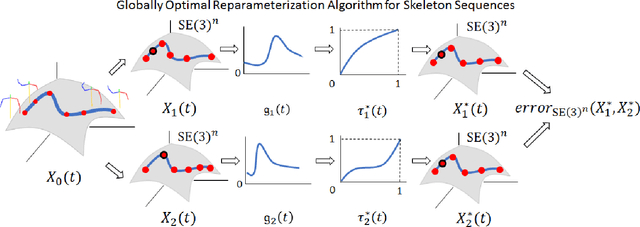
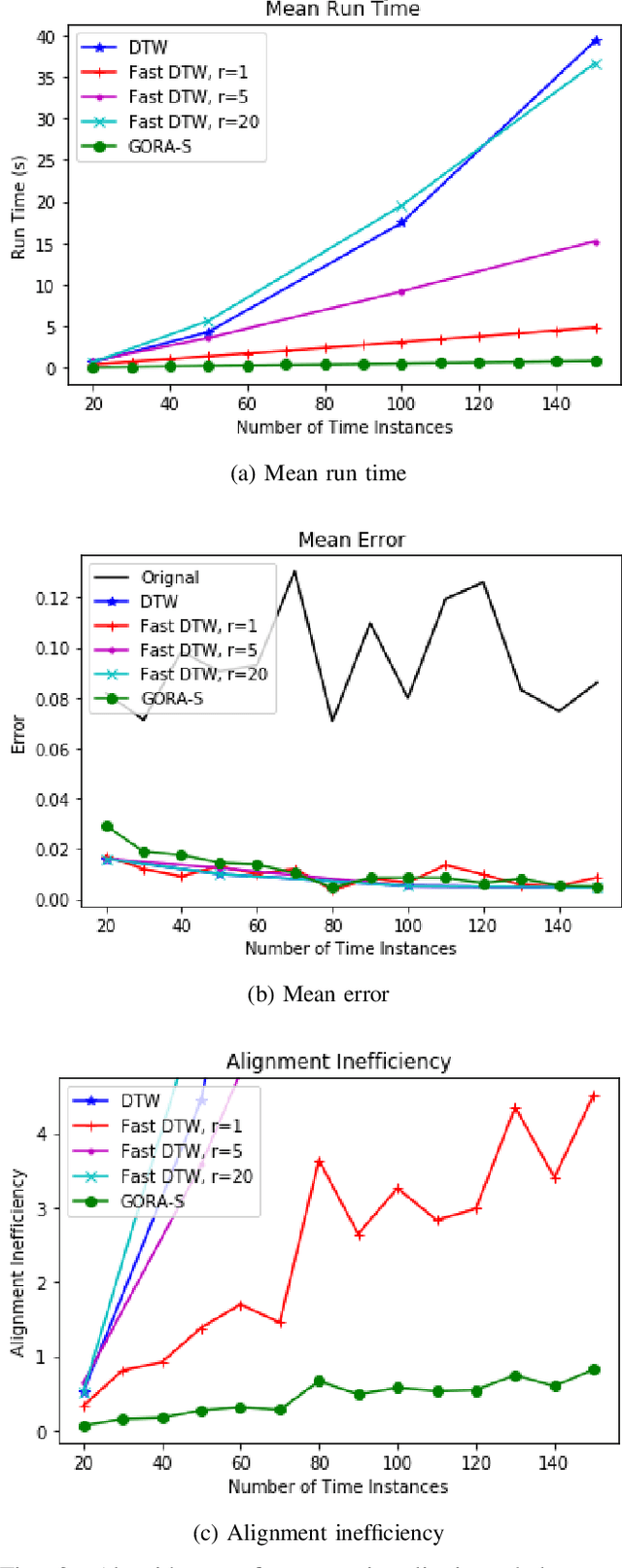
The general ability to analyze and classify the 3D kinematics of the human form is an essential step in the development of socially adept humanoid robots. A variety of different types of signals can be used by machines to represent and characterize actions such as RGB videos, infrared maps, and optical flow. In particular, skeleton sequences provide a natural 3D kinematic description of human motions and can be acquired in real time using RGB+D cameras. Moreover, skeleton sequences are generalizable to characterize the motions of both humans and humanoid robots. The Globally Optimal Reparameterization Algorithm (GORA) is a novel, recently proposed algorithm for signal alignment in which signals are reparameterized to a globally optimal universal standard timescale (UST). Here, we introduce a variant of GORA for humanoid action recognition with skeleton sequences, which we call GORA-S. We briefly review the algorithm's mathematical foundations and contextualize them in the problem of action recognition with skeleton sequences. Subsequently, we introduce GORA-S and discuss parameters and numerical techniques for its effective implementation. We then compare its performance with that of the DTW and FastDTW algorithms, in terms of computational efficiency and accuracy in matching skeletons. Our results show that GORA-S attains a complexity that is significantly less than that of any tested DTW method. In addition, it displays a favorable balance between speed and accuracy that remains invariant under changes in skeleton sampling frequency, lending it a degree of versatility that could make it well-suited for a variety of action recognition tasks.