 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSiamese Regression Networks with Efficient mid-level Feature Extraction for 3D Object Pose Estimation
Paper and Code
Jul 08, 2016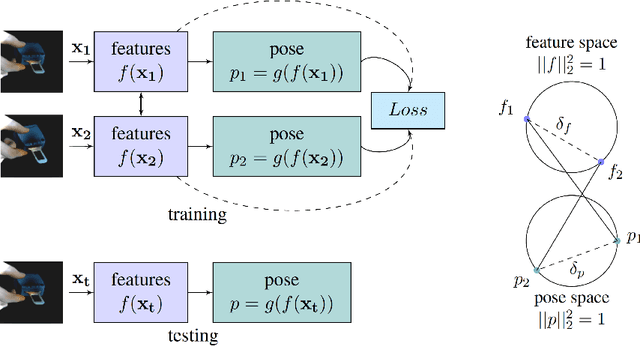

In this paper we tackle the problem of estimating the 3D pose of object instances, using convolutional neural networks. State of the art methods usually solve the challenging problem of regression in angle space indirectly, focusing on learning discriminative features that are later fed into a separate architecture for 3D pose estimation. In contrast, we propose an end-to-end learning framework for directly regressing object poses by exploiting Siamese Networks. For a given image pair, we enforce a similarity measure between the representation of the sample images in the feature and pose space respectively, that is shown to boost regression performance. Furthermore, we argue that our pose-guided feature learning using our Siamese Regression Network generates more discriminative features that outperform the state of the art. Last, our feature learning formulation provides the ability of learning features that can perform under severe occlusions, demonstrating high performance on our novel hand-object dataset.