 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShould Radar Replace Lidar in All-Weather Mapping and Localization?
Paper and Code
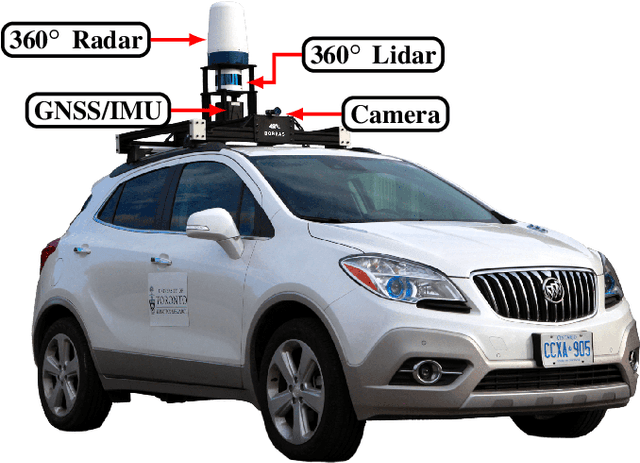
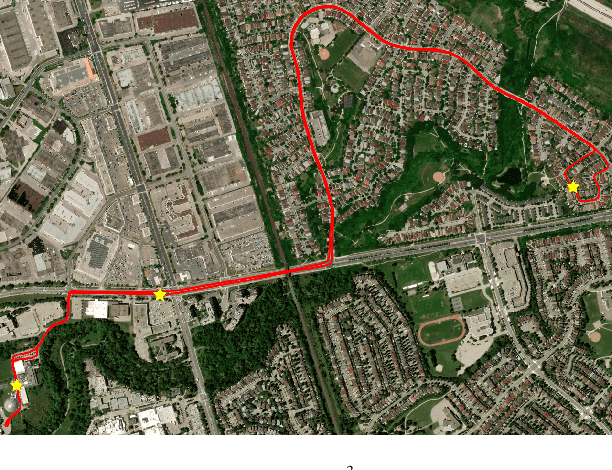
Radar is a rich sensing modality that is a compelling alternative to lidar for its inherent robustness to precipitation, dust, and fog. In this paper, we investigate radar-based mapping and localization as an alternative to lidar by demonstrating the performance of our own radar-based pipeline. We present extensive comparisons against a lidar-based pipeline across varying seasonal and weather conditions using our own publicly available dataset collected on a repeated route over the course of one year. Our experiments show that while lidar achieves better overall localization accuracy, our radar-based pipeline achieves comparable SE(2) results using a fraction of the computational and memory resources required by the lidar-based pipeline. We additionally demonstrate our radar-based pipeline localizing against lidar maps with better accuracy than the current state of the art for radar-to-lidar localization. Code for this project can be found at: https://github.com/utiasASRL/vtr3