 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShape Formation by Programmable Particles
Paper and Code
Sep 09, 2017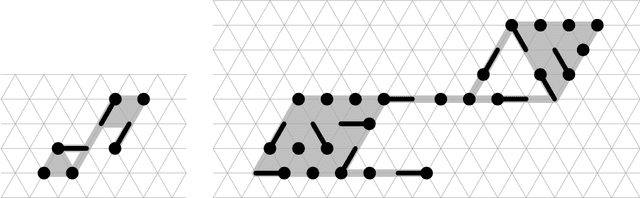
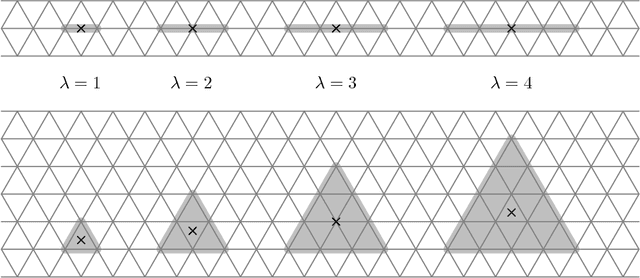

Shape formation is a basic distributed problem for systems of computational mobile entities. Intensively studied for systems of autonomous mobile robots, it has recently been investigated in the realm of programmable matter. Namely, it has been studied in the geometric Amoebot model, where the anonymous entities, called particles, operate on a hexagonal tessellation of the plane and have limited computational power (they have constant memory), strictly local interaction and communication capabilities (only with particles in neighboring nodes of the grid), and limited motorial capabilities (from a grid node to an empty neighboring node); their activation is controlled by an adversarial scheduler. Recent investigations have shown how, starting from a well-structured configuration in which the particles form a (not necessarily complete) triangle, the particles can form a large class of shapes. This result has been established under several assumptions: agreement on the clockwise direction (i.e., chirality), a sequential activation schedule, and randomization (i.e., particles can flip coins). In this paper we provide a characterization of which shapes can be formed deterministically starting from any simply connected initial configuration of $n$ particles. As a byproduct, if randomization is allowed, then any input shape can be formed from any initial (simply connected) shape by our algorithm, provided that $n$ is large enough. Our algorithm works without chirality, proving that chirality is computationally irrelevant for shape formation. Furthermore, it works under a strong adversarial scheduler, not necessarily sequential. We also consider the complexity of shape formation in terms of both the number of rounds and of moves performed by the particles. We prove that our solution has a complexity of $O(n^2)$ rounds and moves: this number of moves is also asymptotically optimal.