 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSequential Bayesian Optimisation as a POMDP for Environment Monitoring with UAVs
Paper and Code
Mar 13, 2017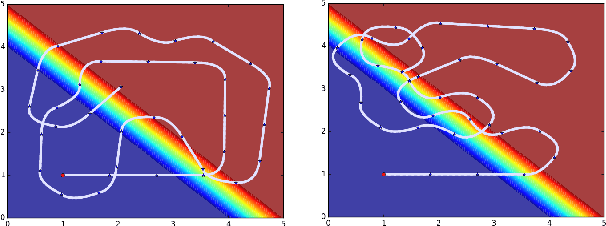
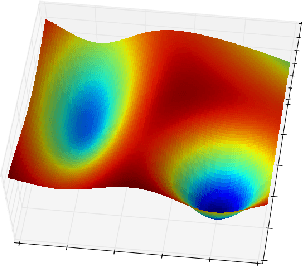
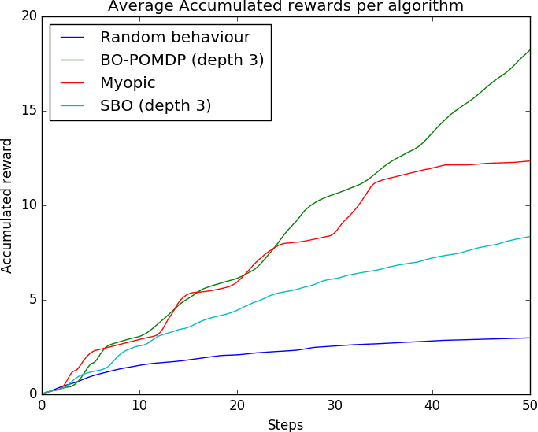
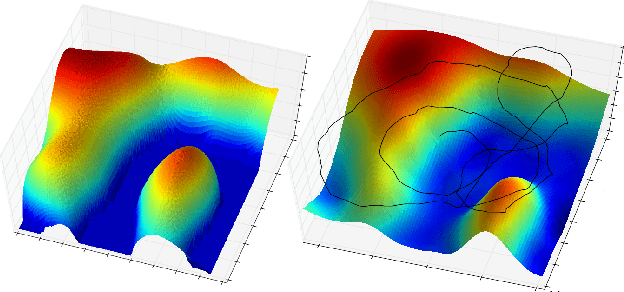
Bayesian Optimisation has gained much popularity lately, as a global optimisation technique for functions that are expensive to evaluate or unknown a priori. While classical BO focuses on where to gather an observation next, it does not take into account practical constraints for a robotic system such as where it is physically possible to gather samples from, nor the sequential nature of the problem while executing a trajectory. In field robotics and other real-life situations, physical and trajectory constraints are inherent problems. This paper addresses these issues by formulating Bayesian Optimisation for continuous trajectories within a Partially Observable Markov Decision Process (POMDP) framework. The resulting POMDP is solved using Monte-Carlo Tree Search (MCTS), which we adapt to using a reward function balancing exploration and exploitation. Experiments on monitoring a spatial phenomenon with a UAV illustrate how our BO-POMDP algorithm outperforms competing techniques.