 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSequential Amodal Segmentation via Cumulative Occlusion Learning
Paper and Code
May 09, 2024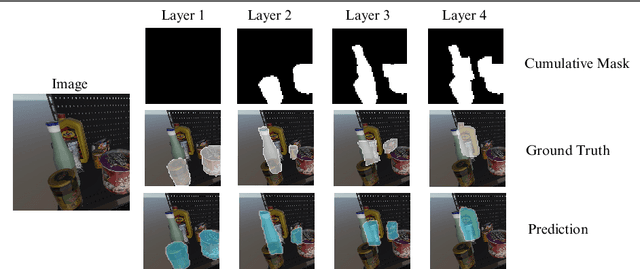
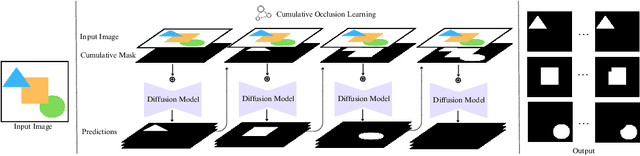
To fully understand the 3D context of a single image, a visual system must be able to segment both the visible and occluded regions of objects, while discerning their occlusion order. Ideally, the system should be able to handle any object and not be restricted to segmenting a limited set of object classes, especially in robotic applications. Addressing this need, we introduce a diffusion model with cumulative occlusion learning designed for sequential amodal segmentation of objects with uncertain categories. This model iteratively refines the prediction using the cumulative mask strategy during diffusion, effectively capturing the uncertainty of invisible regions and adeptly reproducing the complex distribution of shapes and occlusion orders of occluded objects. It is akin to the human capability for amodal perception, i.e., to decipher the spatial ordering among objects and accurately predict complete contours for occluded objects in densely layered visual scenes. Experimental results across three amodal datasets show that our method outperforms established baselines.