 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeparable Convolutional Eigen-Filters (SCEF): Building Efficient CNNs Using Redundancy Analysis
Paper and Code
Nov 16, 2019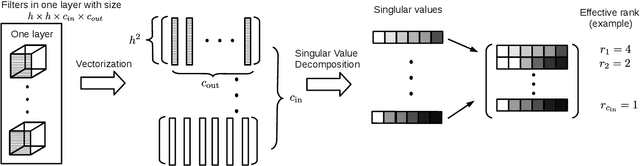
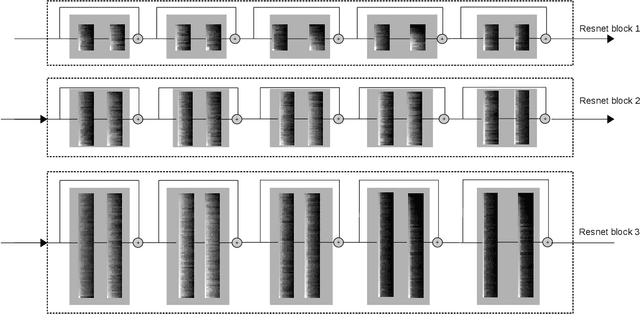
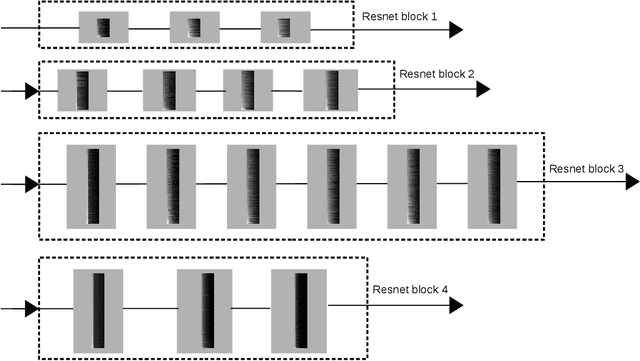
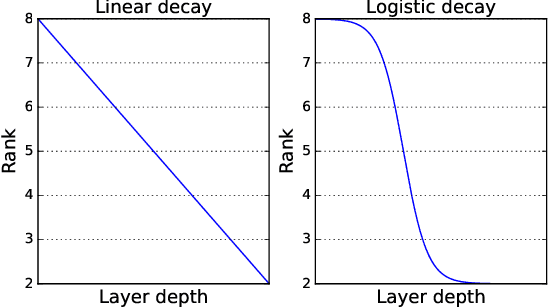
Deep Convolutional Neural Networks (CNNs) have been widely used in computer vision due to its effectiveness. While the high model complexity of CNN enables remarkable learning capacity, the large number of trainable parameters comes with a high cost. In addition to the demand of a large amount of resources, the high complexity of the network can result in a high variance in its generalization performance from a statistical learning theory perspective. One way to reduce the complexity of a network without sacrificing its accuracy is to define and identify redundancies in order to remove them. In this work, we propose a method to observe and analyze redundancies in the weights of 2D convolutional (Conv2D) filters. From our experiments, we observe that 1) the vectorized Conv2D filters exhibit low rank behaviors; 2) the effective ranks of these filters typically decrease when the network goes deeper, and 3) these effective ranks are converging over training steps. Inspired by these observations, we propose a new layer called Separable Convolutional Eigen-Filters (SCEF) as an alternative parameterization to Conv2D filters. A SCEF layer can be easily implemented using the depthwise separable convolutions trained with our proposed training strategy. In addition to the decreased number of trainable parameters by using SCEF, depthwise separable convolutions are known to be more computationally efficient compared to Conv2D operations, which reduces the runtime FLOPs as well. Experiments are conducted on the CIFAR-10 and ImageNet datasets by replacing the Conv2D layers with SCEF. The results have shown an increased accuracy using about 2/3 of the original parameters and reduce the number of FLOPs to 2/3 of the base net.