 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensor Fusion for Predictive Control of Human-Prosthesis-Environment Dynamics in Assistive Walking: A Survey
Paper and Code
Mar 22, 2019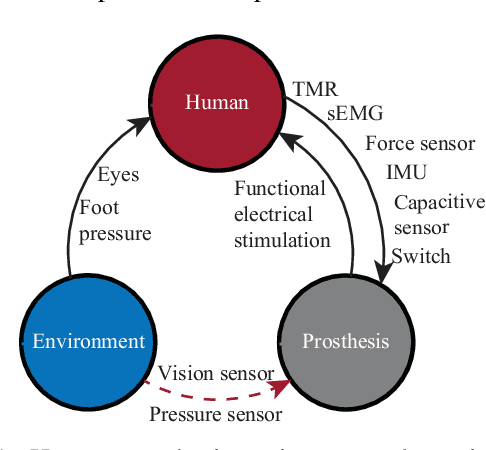
This survey paper concerns Sensor Fusion for Predictive Control of Human-Prosthesis-Environment Dynamics in Assistive Walking. The powered lower limb prosthesis can imitate the human limb motion and help amputees to recover the walking ability, but it is still a challenge for amputees to walk in complex environments with the powered prosthesis. Previous researchers mainly focused on the interaction between a human and the prosthesis without considering the environmental information, which can provide an environmental context for human-prosthesis interaction. Therefore, in this review, recent sensor fusion methods for the predictive control of human-prosthesis-environment dynamics in assistive walking are critically surveyed. In that backdrop, several pertinent research issues that need further investigation are presented. In particular, general controllers, comparison of sensors, and complete procedures of sensor fusion methods that are applicable in assistive walking are introduced. Also, possible sensor fusion research for human-prosthesis-environment dynamics is presented.