Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensor Fusion for Joint 3D Object Detection and Semantic Segmentation
Paper and Code
Apr 25, 2019

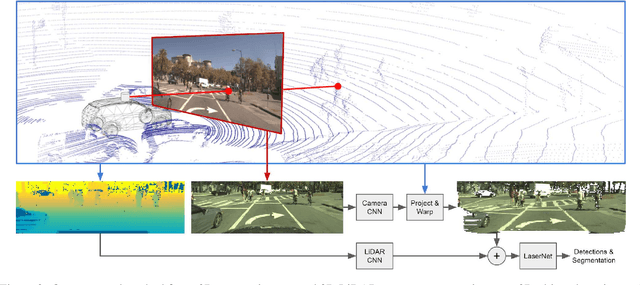
In this paper, we present an extension to LaserNet, an efficient and state-of-the-art LiDAR based 3D object detector. We propose a method for fusing image data with the LiDAR data and show that this sensor fusion method improves the detection performance of the model especially at long ranges. The addition of image data is straightforward and does not require image labels. Furthermore, we expand the capabilities of the model to perform 3D semantic segmentation in addition to 3D object detection. On a large benchmark dataset, we demonstrate our approach achieves state-of-the-art performance on both object detection and semantic segmentation while maintaining a low runtime.
* Accepted for publication at CVPR Workshop on Autonomous Driving 2019
View paper on