 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensing Surface Patches in Volume Rendering for Inferring Signed Distance Functions
Paper and Code



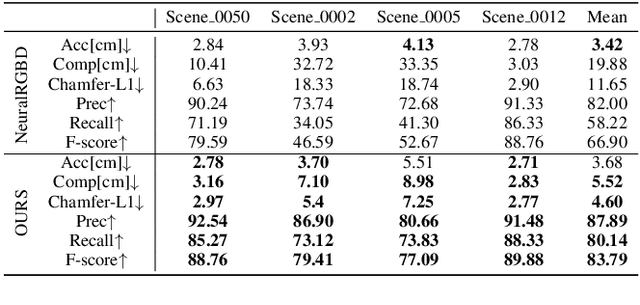
It is vital to recover 3D geometry from multi-view RGB images in many 3D computer vision tasks. The latest methods infer the geometry represented as a signed distance field by minimizing the rendering error on the field through volume rendering. However, it is still challenging to explicitly impose constraints on surfaces for inferring more geometry details due to the limited ability of sensing surfaces in volume rendering. To resolve this problem, we introduce a method to infer signed distance functions (SDFs) with a better sense of surfaces through volume rendering. Using the gradients and signed distances, we establish a small surface patch centered at the estimated intersection along a ray by pulling points randomly sampled nearby. Hence, we are able to explicitly impose surface constraints on the sensed surface patch, such as multi-view photo consistency and supervision from depth or normal priors, through volume rendering. We evaluate our method by numerical and visual comparisons on scene benchmarks. Our superiority over the latest methods justifies our effectiveness.