 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantics for UGV Registration in GPS-denied Environments
Paper and Code
Sep 19, 2016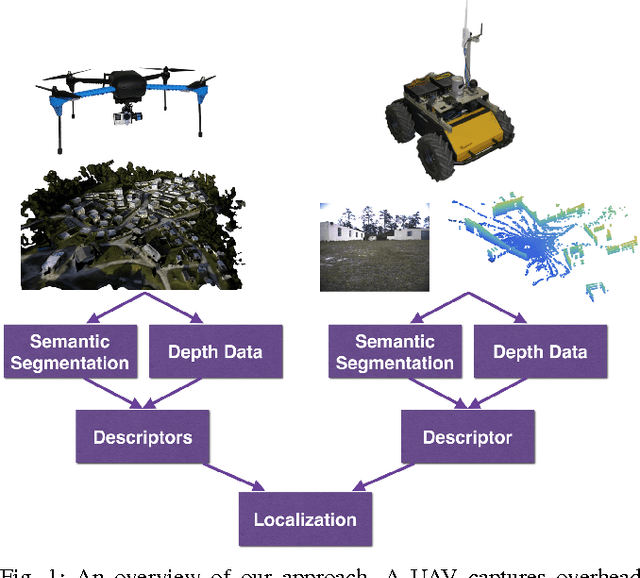


Localization in a global map is critical to success in many autonomous robot missions. This is particularly challenging for multi-robot operations in unknown and adverse environments. Here, we are concerned with providing a small unmanned ground vehicle (UGV) the ability to localize itself within a 2.5D aerial map generated from imagery captured by a low-flying unmanned aerial vehicle (UAV). We consider the scenario where GPS is unavailable and appearance-based scene changes may have occurred between the UAV's flight and the start of the UGV's mission. We present a GPS-free solution to this localization problem that is robust to appearance shifts by exploiting high-level, semantic representations of image and depth data. Using data gathered at an urban test site, we empirically demonstrate that our technique yields results within five meters of a GPS-based approach.